Elektromagnetisk svævekraft

Kan en magnet svæve eller svæve over en anden magnet? Hvorfor ikke – det virker som om det burde virke!
Det er desværre ikke muligt at få en magnet til at svæve magisk i luften over en anden magnet. Det gælder i det mindste, hvis du kun bruger et par stærke magneter. I vores artikel om Magnet Basics nævnte vi Earnshaw’s Theorem, et bevis fra 1800-tallet, som viser, at det ikke virker, uanset hvor mange magneter du tilføjer til systemet.
Men hvad nu, hvis magneterne er formet som en skål? Eller der tilføjes endnu en magnet på siden? Niks. Earnshaw.
Lad os undersøge et system, der på en eller anden måde omgår gamle Earnshaw, og som formår at holde en magnet svævende stabilt i luften. Den kan endda holde en lille mængde vægt!
Hæng på – det bliver mere kompliceret herfra.
Først skal vi se det i aktion!
Produkter baseret på dette system


Vi har set en række produkter, der bruger dette system. Disse ting synes at fange øjnene på de sociale medier. Vi har set svævende kugler, hvor jorden svæver i luften på en eller anden måde.
Vi har endda set den samme teknik brugt til at svæve et lille bonsai-træ! Så sejt.
Hvordan virker det? Lad os gennemgå det trin for trin.
Start enkelt

Den grundlæggende idé er at få en magnet til at svæve ved at holde den oppe ved hjælp af den frastødende kraft fra en anden magnet. Magneter kan frastøde hinanden med tilstrækkelig kraft. At have tilstrækkelig kraft til at få den til at svæve er ikke problemet.
Problemet er, at denne opsætning ikke er stabil. Den svævende magnet har en tendens til at rotere rundt og vende sig selv for at tiltrække den anden magnet.
Det gælder også, selv om man beklæder en skål med en masse magneter, fordi Earnshaw.
Stabilitet, ingeniør-stil


Lad os tage et øjeblik til at definere, hvad vi mener med stabilitet. Et stabilt system er noget, der er i balance, men som også har en tendens til at gå tilbage til den centrerede, afbalancerede position, hvis man støder det en smule.
Som eksempel kan man tænke på en lang pind eller stang, der holdes oppefra. Den er stabil, når den hænger lige ned. Hvis vi skubber bunden væk fra en lige nedadgående position, vil tyngdekraften have en tendens til at trække den tilbage til den stabile position.
Sikkert er det, at den måske ikke knækker på plads ved første sving. Den vil svinge frem og tilbage i et stykke tid, med successivt kortere svingninger, efterhånden som den sætter sig fast. Det har en tendens til at gå tilbage til sidst.
Et ustabilt system er noget, der kan være i balance, men hvis det kommer ud af balance, har det en tendens til at blive mere ubalanceret. Overvej at holde den samme pind med hånden holdt fladt i bunden. Det er muligt at balancere den, men når pinden læner sig ud af balance, har den en tendens til at falde mere ud af balance.
Du kan holde en pind på denne måde, men kun ved hele tiden at justere din håndposition for at holde den i balance. Du ser og mærker, hvilken vej den falder, og reagerer ved at bevæge hånden for at modvirke det. Du ser og reagerer og gentager det hele tiden. Interessant nok fungerer den svævende magnetopstilling på stort set samme måde.
Elektromagneter, sensorer, feedback og kontrol
Lad os vende tilbage til at svæve en magnet. Hvordan holder denne anordning den stabil?
Ud over at afstøde magneter har denne levitator fire elektromagneter. Hvis den svævende magnet tipper den ene vej, kan den hurtigt tænde en elektromagnet for at afstøde den tilbage til den centrerede position. Hvis systemet kan reagere hurtigt nok, kan elektromagneterne tændes og slukkes efter behov for at holde magneten i ro. Det gode ved elektromagneter er, at de drives med en strøm gennem ledningen. Hvis man ved, hvordan man tænder og slukker ting med elektronik, har man et middel til at styre elektromagneten hurtigt og præcist.
Dette system overtræder ikke Earnshaws sætning, fordi det ikke bruger et antal permanente (altid tændte) magneter til at holde den svævende magnet oppe. Det har aktivt styrede magneter, der tændes og slukkes og reagerer på fejljustering og korrigerer ustabiliteten.
Temporære magneter
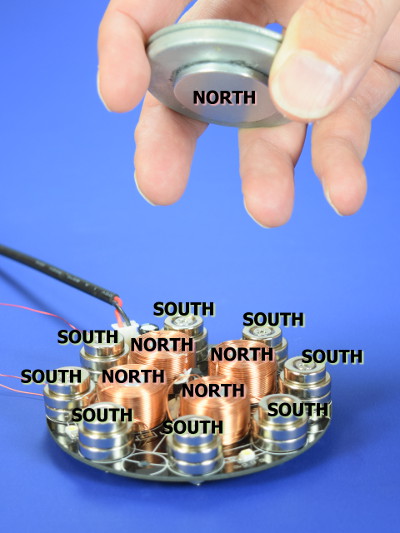
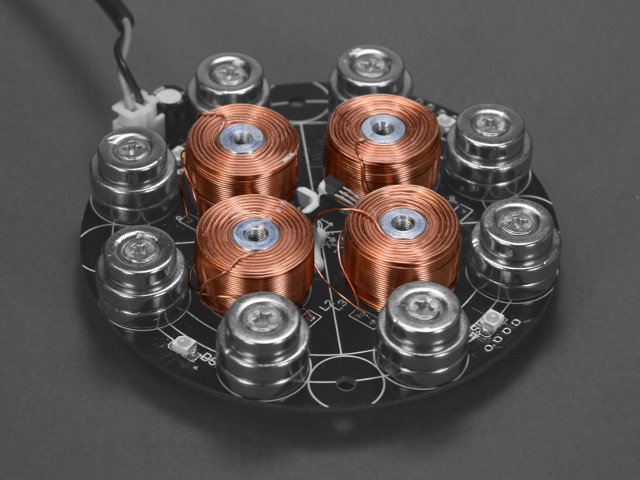
Først skal vi se nærmere på den mærkelige opsætning, der anvendes i bunden af denne tingest. Når strømmen er slukket, hvor er magneterne så placeret, og hvilken vej vender de? Der er tre forskellige steder, hvor vi skal kigge på magnetiseringsretningen:
- Vi ser en række magneter arrangeret i en ring rundt om ydersiden. De er alle orienteret med sydpolerne opad.
- Der er en enkelt skivemagnet i bunden af den flydende magnet, der er orienteret med nordpolen nedad.
- Der er fire elektromagneter, spoler af isoleret tråd, der er viklet om stålskafter. På grund af feltet fra den nærliggende ring af magneter bliver disse stålkerner midlertidigt magnetiseret og opfører sig som magneter med nordpolen opad.
Vent, hvad sker der i den sidste del? De er ikke magneter, men det er de?

Stål eller jern kan fungere som en midlertidig magnet. Når der påføres et magnetfelt på det (sæt en magnet på det eller i nærheden af det), kanaliserer feltet gennem stålet, hvilket får stålet til at virke som en magnet (så længe magneten er der). Dette svarer til tricket med snoren af papirclips, hvor en papirclips med en magnet fastgjort til den kan samle en anden papirclips op, fordi den opfører sig som en magnet. Vi kan se på stålpapirklipsen og sige, at den har en nord- og en sydpol.

En stålbolt virker som en magnet, når en neodym-magnet rører ved den. En stålbolt kan også virke som en magnet blot ved at have en neodymmagnet i nærheden af den. Det er det, der sker her i denne anordning. Disse stålkerner virker som magneter med deres nordpoler opad og frastøder den flydende magnets nordpol.
Når de er tændt, kan elektromagneterne tilføje til styrken af disse magneter efter behov.
Systemet er ikke stabilt af sig selv. Hvis man forsøger at balancere den flydende magnet uden at tænde for enheden, knækker den hurtigt ud til siden.
Hvorfor blev en så tilsyneladende kompleks opsætning valgt til dette design? Godt spørgsmål. Vi tror, det kan have noget at gøre med at lave et bredere område, hvor den flydende magnet kan være næsten stabil, sat i “skålen” af det magnetiske felt, der går fra nordpolerne i midten, op over og ned i sydpolerne på ydersiden.
Sensorer
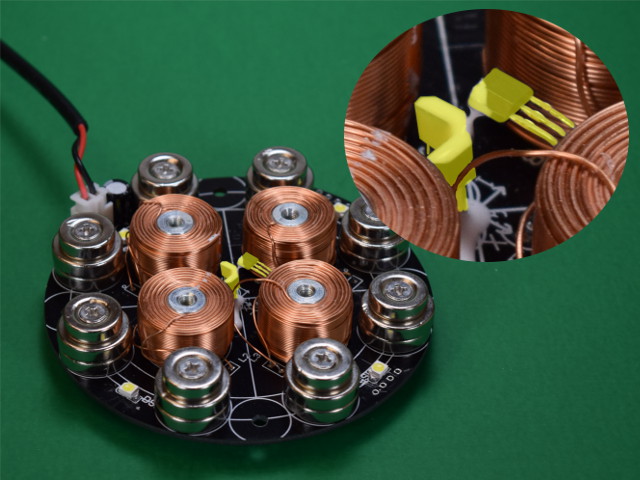
For at kunne styre elektromagneterne korrekt har apparatet brug for en måde at registrere den flydende magnets position nøjagtigt på. Den skal kunne registrere den mindste ændring i positionen, så den kan reagere hurtigt.
I denne anordning anvendes der tre ratiometriske Hall-effekt-sensorer. I en tidligere artikel om Hall-effekt-sensorer så vi på simple enheder, som i det væsentlige er tænd/sluk-kontakter. Hvis de “ser” et magnetfelt, der er over en vis styrke, tænder de.
De ratiometriske sensorer, der anvendes her, er anderledes. I stedet for en sensor, der slår til eller fra ved en bestemt feltstyrke, leverer de små chips en spænding, der varierer med styrken af det magnetfelt, de ser. Hvis magnetfeltet bliver stærkere, stiger spændingen. De er gode til at registrere små ændringer i magnetfeltets styrke.
Der er tre af disse sensorer placeret i midten af enheden. De er orienteret til at registrere magnetfeltet i hver retning: op og ned, venstre og højre, for og agter. Bevæbnet med en smule magnetisk viden giver aflæsningerne fra disse tre sensorer tilstrækkelige oplysninger om den flydende magnetens højde og position.
Når den flydende magnet tipper ud til siden, kan systemet registrere det ud fra disse input og tænde for den højre elektromagnet for at give den et korrigerende skub.
Kontrol

Denne anordning har tre sensorer og fire separat styrede elektromagneter. Lad os tage et kig på blot en lille del af systemet for at få et indtryk af, hvad der foregår. Vi tilsluttede et oscilloskop til to interessante punkter:
- Spændingen ud fra en af sensorerne, der peger sidelæns (ikke op-ned-sensoren), og
- Spændingen på en af spolerne (i samme retning).
Sensorens signal, der er vist med gult, er meget støjende. Ignorer dog støjen, og se blot på det samlede spændingsniveau. Vi så, at det bliver højere eller lavere afhængigt af magnetens position. Det ligger omkring 1,75 volt, men ændrer sig en lille smule, når vi trykkede på magneten. Ændringerne er kun nogle få millivolt, selv når vi skubber drastisk rundt på magneten.
Det blå signal viser spændingen til en af elektromagnetspolerne. Den går op til ca. 2,5 V og tilbage til nul. Det er enten tændt eller slukket. Den tændes hver 1/100.000-del af et sekund.
I stedet for at justere styrken varierer styrekredsløbet, hvor længe det lader den pågældende spole være tændt i løbet af denne 1/100.000-del af et sekund. Hvis den ikke har brug for meget skub, er den på måske 5% af tiden. Når vi rører ved den flydende magnet, er den tændt længere. Det kan du se på bredden af optidssignalet.
Denne styring af elektromagnetten slår til og fra ved 100 kHz. Det er 100 kiloHertz, eller 100.000 gange i sekundet. Det er virkelig hurtigt!
Vi havde håbet at kunne koble dette signal til en højttaler, så vi kunne høre det som lyd. Det ville være fedt at høre den interaktive lydfeedback. Desværre er 100 kHz langt over den højeste frekvens, som mennesker kan høre. Det er endda over en hunds evne til at høre det! Vi ville enten være nødt til at nedjustere signalet eller spørge nogle delfiner, hvad de synes om det.
Det er et kig på blot én sensor og én af de fire elektromagneter. De tre andre arbejder på lignende måde for at modvirke vipper i de andre retninger.
Ud over at bruge de fire elektromagneter individuelt for at forhindre, at den flydende magnet tipper væk i en hvilken som helst retning, skal hele systemet også kontrollere det samlede signalniveau til alle fire elektromagneter. Det kommer til at påvirke højden af den flydende magnet over basen.
Konklusioner
Vi har haft det meget sjovt med at prøve at finde ud af, hvordan denne anordning fungerer. Jo mere vi fandt ud af det, jo mere fandt vi hele emner, som vi slet ikke havde overvejet. For eksempel:
- Systemet er følsomt over for vægten af den svævende magnet. Hvis den er for let, vil det ikke fungere godt. Det har brug for en vis minimumsvægt for den måde, det er sat op på.
- Der er en stålskive over den tynde flydende magnet. Dette giver naturligvis ballast, men det har også en reel virkning på formen af magnetfeltet. Ved nogle forsøg fandt vi ud af, at vi ikke kunne få en magnet til at flyde uden denne stålskive ovenpå, hvilket udjævner feltet. Hvorfor fungerer dette arrangement så godt? Hvorfor ikke bare en magnet med ikke-jernholdig ballast?
Vi har ofte forsøgt at forklare, hvor kompliceret magnetisk levitation kan være, vi havde ingen idé om, hvor meget mere det indebærer!
Addendum: Et meget enklere system

Vi har et levitationssæt, som vi erhvervede for mange år siden, og som har en meget enklere opsætning. Se ART TEC Magnetic Levitation Kit af Guy Marsden.
Denne opsætning vender systemet på hovedet, hvilket gør tingene meget nemmere. Det har en enkelt elektromagnet, der er placeret over den flydende magnet. Elektromagneten kan tændes og slukkes for at styre magnetens lodrette position.
Da magneten “hænger” nedenunder, har den en tendens til at være naturligt stabil fra side til side. Ligesom en lang stang, der hænger nedad, får man naturlig stabilitet i denne konfiguration. Systemet behøver ikke at gøre noget fancy for at styre sidebevægelsen.
Vi koblede også denne til oscilloskopet og fandt et andet kontrolskema. I stedet for at tænde og slukke for elektromagneten med faste intervaller, tænder og slukker den efter behov og reagerer på sensorens måling. Når magneten begynder at blive for lav, tænder den for at trække den op. Når magneten begynder at blive for høj, slukker den.
Frekvensen af denne til- og frakobling varierer alt efter, hvad sensoren siger. Vi fandt ud af, at frekvensen ændrede sig, når vi prøvede at hænge forskellige magneter og/eller forskellige vægte på den.
Når man ser elektroniske produkter, der lader noget svæve ved hjælp af en af disse to grundlæggende opsætninger, kan man som regel regne ud, hvilken af dem det er. Hvis der er noget over den svævende genstand, er det dette andet, enklere system. Hvis der ikke er noget over det svævende objekt, er det det det første.