Elektromagnetische Levitation

Kann ein Magnet schweben oder über einem anderen Magneten schweben? Warum nicht – es sollte doch funktionieren!
Leider kann man einen Magneten nicht auf magische Weise über einem anderen Magneten schweben lassen. Zumindest gilt das, wenn man nur ein Paar starke Magnete verwendet. In unserem Artikel über die Grundlagen des Magnetismus haben wir das Earnshaw’sche Theorem erwähnt, einen Beweis aus dem Jahr 1800, der beweist, dass es nicht funktioniert, egal wie viele Magnete man dem System hinzufügt.
Aber was ist, wenn die Magnete die Form einer Schale haben? Oder ein weiterer Magnet an der Seite hinzugefügt wird? Nö. Earnshaw.
Lassen Sie uns ein System untersuchen, das irgendwie den alten Earnshaw umgeht und es schafft, einen Magneten beständig in der Luft schweben zu lassen. Es kann sogar eine kleine Menge Gewicht halten!
Wartet ab – von hier an werden die Dinge komplizierter.
Zuerst wollen wir es in Aktion sehen!
Produkte, die auf diesem System basieren


Wir haben eine Reihe von Produkten gesehen, die dieses System verwenden. Diese Dinge scheinen die Aufmerksamkeit der sozialen Medien auf sich zu ziehen. Wir haben schwebende Kugeln gesehen, bei denen die Erde irgendwie in der Luft schwebt.
Wir haben sogar gesehen, wie die gleiche Technik verwendet wurde, um einen kleinen Bonsai-Baum schweben zu lassen! So cool.
Wie funktioniert das? Gehen wir Schritt für Schritt vor.
Einfach anfangen

Die Grundidee ist, einen Magneten schweben zu lassen, indem man ihn mit der Abstoßungskraft eines anderen Magneten hochhält. Magnete können sich bei ausreichender Kraft gegenseitig abstoßen. Genug Kraft zu haben, um ihn schweben zu lassen, ist nicht das Problem.
Das Problem ist, dass dieser Aufbau nicht stabil ist. Der schwebende Magnet neigt dazu, sich zu drehen und sich umzudrehen, um den anderen Magneten anzuziehen.
Das gilt selbst dann, wenn man eine Schale mit einem Haufen Magneten auslegt, weil Earnshaw.
Stabilität, Ingenieursstil


Lassen Sie uns einen Moment Zeit, um zu definieren, was wir mit Stabilität meinen. Ein stabiles System ist etwas, das im Gleichgewicht ist, aber auch dazu neigt, in die zentrierte, ausgeglichene Position zurückzukehren, wenn man es ein wenig anstößt.
Betrachten wir als Beispiel einen langen Stock oder eine Stange, die von oben gehalten wird. Er ist stabil, wenn er gerade nach unten hängt. Wenn wir das untere Ende von der geraden Position wegdrücken, zieht die Schwerkraft es zurück in die stabile Position.
Sicherlich wird es nicht gleich beim ersten Schwung einrasten. Es wird eine Weile hin und her schwingen, mit immer kürzeren Schwüngen, wenn es sich beruhigt hat. Er neigt dazu, irgendwann zurückzugehen.
Ein instabiles System ist etwas, das im Gleichgewicht sein kann, aber wenn es aus dem Gleichgewicht gerät, neigt es dazu, noch unausgewogener zu werden. Stellen Sie sich vor, Sie halten denselben Stock mit der flachen Hand am Boden. Es ist möglich, ihn auszubalancieren, aber wenn der Stock aus dem Gleichgewicht gerät, neigt er dazu, noch mehr aus dem Gleichgewicht zu fallen.
Du kannst einen Stock so halten, aber nur, indem du deine Handposition ständig anpasst, um ihn im Gleichgewicht zu halten. Du beobachtest und spürst, in welche Richtung er fällt, und reagierst, indem du deine Hand bewegst, um gegenzusteuern. Du beobachtest und reagierst, was sich ständig wiederholt. Interessanterweise funktioniert der Aufbau des Schwebemagneten auf ähnliche Weise.
Elektromagnete, Sensoren, Rückkopplung und Steuerung
Lassen Sie uns zum Schweben eines Magneten zurückkehren. Wie hält dieses Gerät den Magneten fest?
Zusätzlich zu den abstoßenden Magneten hat dieser Levitator vier Elektromagnete. Wenn der schwebende Magnet in eine Richtung kippt, kann er schnell einen Elektromagneten einschalten, um ihn wieder in die zentrale Position zurückzustoßen. Wenn das System schnell genug reagieren kann, können die Elektromagneten je nach Bedarf ein- und ausgeschaltet werden, um den Magneten stabil zu halten. Das Schöne an Elektromagneten ist, dass sie mit einem Strom durch den Draht betrieben werden. Wenn man weiß, wie man Dinge mit Elektronik ein- und ausschaltet, kann man den Elektromagneten schnell und genau steuern.
Dieses System verstößt nicht gegen das Earnshawsche Theorem, weil es nicht eine Reihe von Permanentmagneten (die immer eingeschaltet sind) verwendet, um den schwebenden Magneten zu halten. Es hat aktiv gesteuerte Magnete, die ein- und ausgeschaltet werden und auf eine Fehlausrichtung reagieren und die Instabilität korrigieren.
Temporäre Magnete
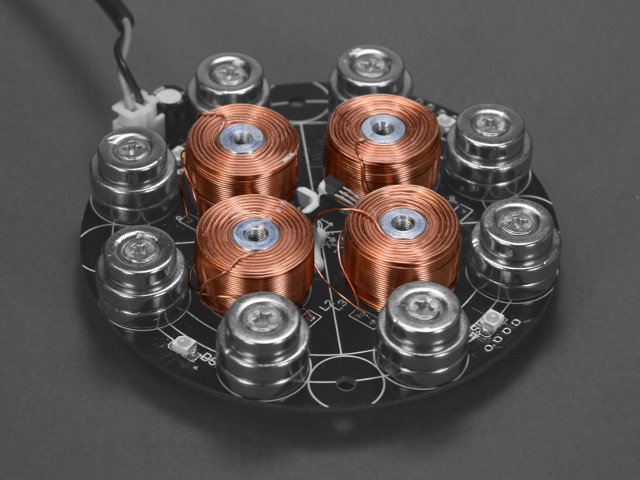
Zunächst wollen wir uns die seltsame Anordnung in der Basis dieses Dings genauer ansehen. Wo befinden sich die Magnete bei ausgeschaltetem Strom und in welche Richtung sind sie gerichtet? Es gibt drei verschiedene Stellen, an denen wir uns die Magnetisierungsrichtung ansehen sollten:
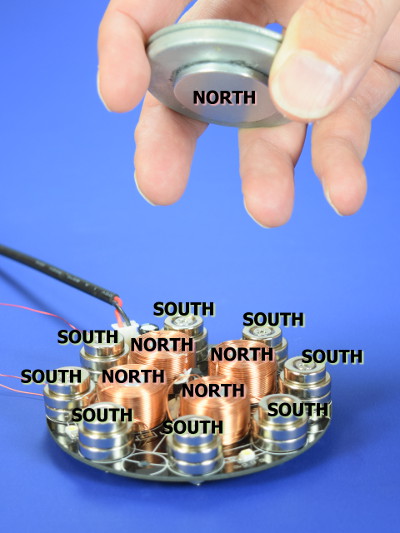
- Wir sehen eine Reihe von Magneten, die ringförmig um die Außenseite angeordnet sind. Sie sind alle so ausgerichtet, dass ihre Südpole nach oben zeigen.
- Ein einzelner Scheibenmagnet befindet sich an der Unterseite des schwebenden Magneten und ist so ausgerichtet, dass sein Nordpol nach unten zeigt.
- Es gibt vier Elektromagnete, Spulen aus isoliertem Draht, die um Stahlwellen gewickelt sind. Durch das Feld des nahegelegenen Magnetrings werden diese Stahlkerne vorübergehend magnetisiert und verhalten sich wie Magnete, deren Nordpole nach oben zeigen.
Warte, was geht in diesem letzten Teil vor? Sie sind keine Magneten, aber sie sind es?

Stahl oder Eisen kann als temporärer Magnet wirken. Wenn man ein Magnetfeld daran anlegt (einen Magneten daran oder in der Nähe), geht das Feld durch den Stahl hindurch, so dass der Stahl wie ein Magnet wirkt (solange der Magnet da ist). Das ist wie der Trick mit der Büroklammer, bei dem eine Büroklammer, an der ein Magnet klebt, eine andere Büroklammer aufheben kann, weil sie sich wie ein Magnet verhält. Wir können die Büroklammer aus Stahl betrachten und sagen, dass sie einen Nord- und einen Südpol hat.

Ein Stahlbolzen wirkt wie ein Magnet, wenn ein Neodym-Magnet ihn berührt. Ein Stahlbolzen kann auch wie ein Magnet wirken, wenn sich ein Neodym-Magnet in seiner Nähe befindet. So ist es auch bei diesem Gerät. Diese Stahlkerne wirken wie Magnete, deren Nordpole nach oben zeigen und den Nordpol des schwebenden Magneten abstoßen.
Wenn sie eingeschaltet sind, können die Elektromagnete die Stärke dieser Magnete nach Bedarf erhöhen.
Das System ist nicht von selbst stabil. Wenn man versucht, den schwebenden Magneten auszubalancieren, ohne das Gerät einzuschalten, schnappt er schnell zur Seite weg.
Warum wurde ein so scheinbar komplexer Aufbau für dieses Design gewählt? Gute Frage. Wir denken, dass es etwas damit zu tun haben könnte, einen breiteren Bereich zu schaffen, in dem der schwebende Magnet nahezu stabil sein kann, in der „Schale“ des Magnetfeldes, das von den Nordpolen in der Mitte über die Südpole an der Außenseite nach oben und unten verläuft.
Sensoren
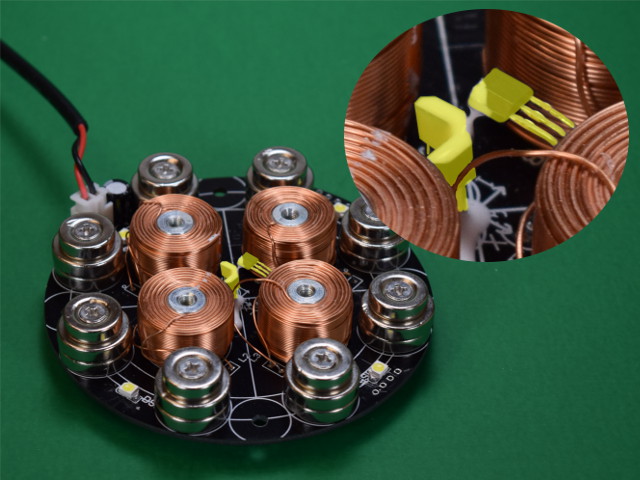
Um die Elektromagneten richtig zu steuern, braucht das Gerät eine Möglichkeit, die Position des schwebenden Magneten genau zu erfassen. Es muss die kleinste Veränderung der Position bemerken, damit es schnell reagieren kann.
In diesem Gerät werden drei ratiometrische Hall-Effekt-Sensoren verwendet. In einem früheren Artikel über Hall-Effekt-Sensoren haben wir uns einfache Geräte angesehen, die im Wesentlichen Ein/Aus-Schalter sind. Wenn sie ein Magnetfeld „sehen“, das über einer bestimmten Stärke liegt, schalten sie sich ein.
Die hier verwendeten ratiometrischen Sensoren sind anders. Statt eines Sensors, der sich bei einer bestimmten Feldstärke ein- oder ausschaltet, liefern die winzigen Chips eine Spannung, die mit der Stärke des Magnetfelds, das sie sehen, variiert. Wenn das Magnetfeld stärker wird, steigt die Spannung an. Sie eignen sich hervorragend, um winzige Änderungen der Magnetfeldstärke zu erkennen.
In der Mitte des Geräts befinden sich drei dieser Sensoren. Sie sind so ausgerichtet, dass sie das Magnetfeld in jeder Richtung messen: oben und unten, links und rechts, vorne und hinten. Mit ein wenig magnetischem Wissen ausgestattet, liefern die Messwerte dieser drei Sensoren genügend Informationen über die Höhe und Position des schwebenden Magneten.
Wenn der schwebende Magnet zur Seite kippt, kann das System dies anhand dieser Eingänge erkennen und den rechten Elektromagneten einschalten, um ihm einen korrigierenden Stoß zu geben.
Steuerung

Dieses Gerät hat drei Sensoren und vier getrennt gesteuerte Elektromagnete. Werfen wir einen Blick auf einen kleinen Teil des Systems, um eine Vorstellung davon zu bekommen, was hier vor sich geht. Wir haben ein Oszilloskop an zwei interessante Punkte angeschlossen:
- Die Spannung, die von einem der Sensoren ausgeht, der seitlich ausgerichtet ist (nicht der Aufwärts-Abwärts-Sensor), und
- die Spannung an einer der Spulen (in derselben Richtung).
Das Sensorsignal, das in Gelb dargestellt ist, ist sehr verrauscht. Ignorieren Sie das Rauschen und schauen Sie sich nur den Gesamtspannungspegel an. Wir haben gesehen, dass sie je nach der Position des Magneten höher oder niedriger wird. Sie liegt bei etwa 1,75 Volt, ändert sich aber geringfügig, wenn wir auf den Magneten drücken. Die Änderungen betragen nur ein paar Millivolt, selbst wenn wir den Magneten stark hin und her schieben.
Das blaue Signal zeigt die Spannung an einer der Elektromagnetspulen. Sie steigt auf etwa 2,5 V und geht wieder auf Null zurück. Es ist entweder an oder aus. Sie schaltet sich alle 1/100.000 Sekunden ein.
Anstatt die Stärke zu regulieren, variiert der Steuerschaltkreis, wie lange er die Spule während dieser 1/100.000 Sekunde eingeschaltet lässt. Wenn sie nicht viel Druck braucht, ist sie vielleicht 5 % der Zeit eingeschaltet. Wenn wir den schwebenden Magneten berühren, bleibt sie länger an. Das kann man an der Breite des Aufwärtssignals sehen.
Diese Steuerung des Elektromagneten schaltet sich bei 100 kHz ein und aus. Das sind 100 KiloHertz, also 100.000 Mal pro Sekunde. Das ist wirklich schnell!
Wir hatten gehofft, dieses Signal an einen Lautsprecher anschließen zu können, damit wir es als Ton hören können. Es wäre toll, dieses interaktive Audio-Feedback zu hören. Leider liegt 100 kHz weit über der höchsten Frequenz, die Menschen hören können. Sie liegt sogar über der Fähigkeit eines Hundes, sie zu hören! Wir müssten entweder das Signal herunterrechnen oder ein paar Delphine fragen, was sie davon halten.
Das ist ein Blick auf nur einen Sensor und einen der vier Elektromagneten. Die anderen drei arbeiten auf ähnliche Weise, um Neigungen in den anderen Richtungen entgegenzuwirken.
Nicht nur, dass die vier Elektromagneten einzeln eingesetzt werden, um zu verhindern, dass der schwimmende Magnet in irgendeine Richtung wegkippt, das ganze System muss auch den Gesamtsignalpegel für alle vier Elektromagneten kontrollieren. Das beeinflusst die Höhe des schwebenden Magneten über der Basis.
Schlussfolgerungen
Wir hatten viel Spaß dabei, herauszufinden, wie dieses Gerät funktioniert. Je mehr wir herausfanden, desto mehr fanden wir Themen, an die wir gar nicht gedacht hatten. Zum Beispiel:
- Das System ist empfindlich gegenüber dem Gewicht des schwebenden Magneten. Wenn er zu leicht ist, wird er nicht gut funktionieren. Es braucht ein gewisses Mindestgewicht für die Art und Weise, wie es aufgebaut ist.
- Über dem dünnen schwebenden Magneten befindet sich eine Stahlunterlegscheibe. Sie dient natürlich als Ballast, aber sie hat auch einen großen Einfluss auf die Form des Magnetfeldes. Bei einigen Tests haben wir festgestellt, dass wir keinen Magneten zum Schweben bringen konnten, ohne dass diese Stahlscheibe obenauf lag und das Feld abflachte. Warum funktioniert diese Anordnung so gut? Warum nicht einfach ein Magnet mit nicht-eisenhaltigem Ballast?
Wir haben oft versucht zu erklären, wie kompliziert Magnetschweben sein kann, wir hatten keine Ahnung, wie viel mehr dazu gehört!
Nachtrag: Ein viel einfacheres System

Wir haben einen Schwebesatz, den wir vor Jahren erworben haben und der einen viel einfacheren Aufbau hat. Schauen Sie sich das ART TEC Magnetic Levitation Kit von Guy Marsden an.
Bei diesem Aufbau wird das System auf den Kopf gestellt, was die Sache viel einfacher macht. Es hat einen einzelnen Elektromagneten, der über dem schwebenden Magneten positioniert ist. Der Elektromagnet lässt sich ein- und ausschalten, um die vertikale Position des Magneten zu steuern.
Da der Magnet unten „hängt“, ist er von Natur aus stabil von Seite zu Seite. Wie eine lange Stange, die nach unten hängt, erhält man in dieser Konfiguration eine natürliche Stabilität. Das System muss nichts Ausgefallenes tun, um die seitliche Bewegung zu kontrollieren.
Wir haben auch dieses Gerät an das Oszilloskop angeschlossen und ein anderes Kontrollschema gefunden. Anstatt den Elektromagneten in festen Intervallen ein- und auszuschalten, schaltet er sich nach Bedarf ein und aus und reagiert auf die Messung des Sensors. Wenn der Magnet zu niedrig wird, schaltet er sich ein und zieht ihn hoch. Wenn der Magnet zu hoch wird, schaltet er sich aus.
Die Häufigkeit dieses Ein- und Ausschaltens hängt davon ab, was der Sensor anzeigt. Wir fanden heraus, dass sich die Frequenz änderte, als wir versuchten, verschiedene Magnete und/oder verschiedene Gewichte daran aufzuhängen.
Wenn man elektronische Produkte sieht, die etwas schweben lassen, indem sie eine dieser beiden Grundkonfigurationen verwenden, kann man normalerweise herausfinden, welche es ist. Wenn sich etwas über dem schwebenden Objekt befindet, handelt es sich um das zweite, einfachere System. Wenn sich nichts über dem schwebenden Objekt befindet, handelt es sich um das erste System.