Elektromagnetische levitatie

Kan een magneet boven een andere magneet zweven? Waarom niet? Het zou moeten werken! Helaas kun je een magneet niet boven een andere magneet laten zweven. Tenminste, dat is waar als je alleen een paar sterke magneten gebruikt. In ons artikel Magnet Basics hebben we het gehad over de stelling van Earnshaw, een bewijs uit de jaren 1800 dat aantoont dat het niet werkt, hoeveel magneten je ook aan het systeem toevoegt.
Maar wat als de magneten de vorm van een kom hebben? Of een andere magneet wordt toegevoegd aan de zijkant? Nee. Earnshaw.
Laten we een systeem onderzoeken dat de oude Earnshaw omzeilt, en erin slaagt een magneet stabiel in de lucht te laten zweven. Het kan zelfs een klein gewicht houden!
Houd je vast – het wordt ingewikkelder vanaf hier.
Laten we het eerst in actie zien!
Producten gebaseerd op dit systeem


We hebben een aantal producten gezien die dit systeem gebruiken. Deze dingen lijken de aandacht te trekken van de sociale media. We hebben zwevende wereldbollen gezien, waarbij de aarde op de een of andere manier in de lucht zweeft.
We hebben zelfs gezien dat dezelfde techniek werd gebruikt om een kleine bonsaiboom te laten zweven! Zo cool.
Hoe werkt het? Laten we het stap voor stap uit de doeken doen.
Start eenvoudig

Het basisidee is een magneet te laten zweven door hem omhoog te houden met de afstotende kracht van een andere magneet. Magneten kunnen elkaar met genoeg kracht afstoten. Genoeg kracht hebben om hem te laten zweven is niet het probleem.
Het probleem is dat deze opstelling niet stabiel is. De zwevende magneet heeft de neiging rond te draaien, zichzelf om te draaien om de andere magneet aan te trekken.
Dit geldt zelfs als je een kom bekleedt met een stel magneten, want Earnshaw.
Stabiliteit, techniek-stijl


Laten we even definiëren wat we met stabiliteit bedoelen. Een stabiel systeem is iets dat in evenwicht is, maar ook de neiging heeft terug te keren naar de gecentreerde, evenwichtige positie als je het een beetje stoot.
Als voorbeeld, denk aan een lange stok of paal, die van bovenaf wordt vastgehouden. Hij hangt stabiel recht naar beneden. Als we de onderkant wegduwen van een recht naar beneden hangende positie, zal de zwaartekracht de neiging hebben hem terug te trekken naar de stabiele positie.
Zeker, hij zal misschien niet bij de eerste zwaai vastklikken. Het zal heen en weer zwaaien voor een beetje, met opeenvolgende kortere schommelingen als het tot rust komt.
Een onstabiel systeem is iets dat in evenwicht kan zijn, maar als het uit balans raakt, heeft het de neiging nog meer uit balans te raken. Houd dezelfde stok eens vast met je hand plat aan de onderkant. Het is mogelijk hem in evenwicht te houden, maar als de stok uit balans raakt, heeft hij de neiging meer uit balans te raken.
Je kunt een stok zo vasthouden, maar alleen door voortdurend je handpositie aan te passen om hem in balans te houden. Je kijkt en voelt welke kant het op valt, reageer door je hand te bewegen om het tegen te gaan. Je kijkt en reageert, en herhaalt dit voortdurend. Interessant genoeg werkt de zwevende magneet op vrijwel dezelfde manier.
Elektromagneten, sensoren, terugkoppeling en besturing
Laten we teruggaan naar het laten zweven van een magneet. Hoe houdt dit apparaat hem stil?
Naast afstotende magneten heeft deze levitator vier elektromagneten. Als de zwevende magneet één kant op kantelt, kan hij snel een elektromagneet inschakelen om hem terug te stoten naar de gecentreerde positie. Als het systeem snel genoeg kan reageren, kunnen de elektromagneten naar behoefte worden in- en uitgeschakeld om de magneet stabiel te houden. Het aardige van elektromagneten is dat zij met een stroom door de draad lopen. Als je weet hoe je dingen met elektronica aan en uit moet zetten, heb je een middel om de elektromagneet snel en nauwkeurig te regelen.
Dit systeem is niet in strijd met de stelling van Earnshaw, omdat het niet een aantal permanente (altijd aan) magneten gebruikt om de zwevende magneet op zijn plaats te houden. Het heeft actief aan- en uitgeschakelde magneten die reageren op scheefstand en de instabiliteit corrigeren.
Tijdelijke magneten
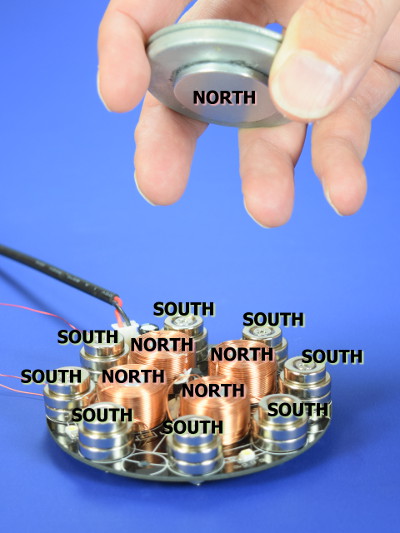
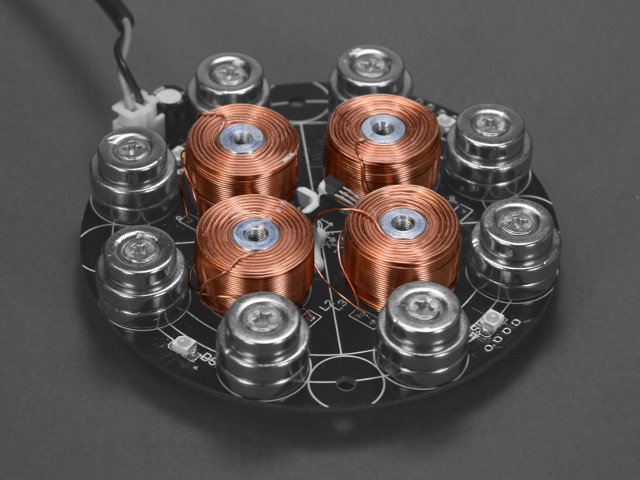
Laten we eerst eens kijken naar de vreemde opstelling die in de basis van dit ding is gebruikt. Met de stroom uitgeschakeld, waar zitten de magneten en welke kant staan ze op? Er zijn drie verschillende plaatsen waar we naar de magnetisatierichting moeten kijken:
- We zien een reeks magneten die in een ring rond de buitenkant zijn gerangschikt. Ze zijn alle georiënteerd met hun zuidpolen naar boven.
- Er is een enkele schijfmagneet op de bodem van de zwevende magneet, georiënteerd met zijn noordpool naar beneden.
- Er zijn vier elektromagneten, spoelen van geïsoleerde draad gewikkeld rond stalen assen. Door het veld van de nabijgelegen ring van magneten, worden deze stalen kernen tijdelijk gemagnetiseerd, en gedragen zich als magneten met de noordpool naar boven.
Wacht, wat gebeurt er in dat laatste deel? Het zijn geen magneten, maar ze zijn het wel?

Staal of ijzer kan fungeren als een tijdelijke magneet. Wanneer er een magnetisch veld op wordt toegepast (plak er een magneet op of in de buurt ervan), kanaliseert het veld zich door het staal, waardoor het staal zich als een magneet gedraagt (zolang die magneet er is). Dit is te vergelijken met de truc van de paperclipstring, waarbij een paperclip met een magneet eraan vast een andere paperclip kan oppakken, omdat hij zich als een magneet gedraagt. We kunnen naar de stalen paperclip kijken en zeggen dat hij een noord- en een zuidpool heeft.

Een stalen bout werkt als een magneet wanneer er een neodymiummagneet tegenaan zit. Een stalen bout kan ook als een magneet werken als er een neodymium magneet in de buurt is. Dat is wat hier gebeurt in dit apparaat. Die stalen kernen werken als magneten met hun noordpolen naar boven, die de noordpool van de zwevende magneet afstoten.
Als ze worden aangezet, kunnen de elektromagneten de kracht van die magneten naar behoefte aanvullen.
Het systeem is op zichzelf niet stabiel. Als u probeert de drijvende magneet in evenwicht te brengen zonder het apparaat aan te zetten, klapt het snel opzij.
Waarom werd zo’n schijnbaar ingewikkelde opstelling gekozen voor dit ontwerp? Goede vraag. We denken dat het misschien iets te maken heeft met het maken van een breder gebied waar de drijvende magneet bijna stabiel kan zijn, ingesteld in de “kom” van het magnetische veld dat loopt van de noordpolen in het midden, omhoog over en omlaag naar de zuidpolen aan de buitenkant.
Sensoren
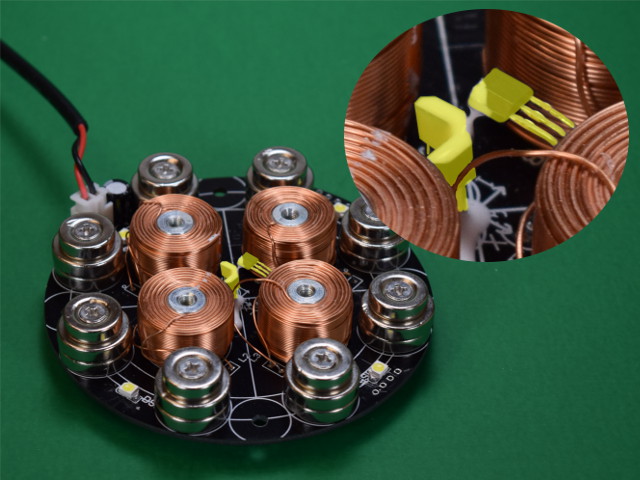
Om de elektromagneten goed te kunnen besturen, moet het apparaat de positie van de zwevende magneet nauwkeurig kunnen waarnemen. Het moet de kleinste verandering in positie opmerken, zodat het snel kan reageren.
In dit apparaat worden drie ratiometrische Hall-effectsensoren gebruikt. In een vorig artikel over Hall-effectsensoren hebben we gekeken naar eenvoudige apparaten die in wezen aan/uit-schakelaars zijn. Als zij een magnetisch veld “zien” dat boven een bepaalde sterkte is, gaan zij aan.
De hier gebruikte ratiometrische sensoren zijn anders. In plaats van een sensor die aan of uit gaat bij een bepaalde veldsterkte, leveren de kleine chips een spanning die varieert met de sterkte van het magnetische veld dat ze zien. Als het magnetisch veld sterker wordt, gaat de spanning omhoog. Ze zijn zeer geschikt om kleine veranderingen in de magnetische veldsterkte waar te nemen.
Er zijn drie van deze sensoren in het midden van het apparaat. Ze zijn gericht om het magnetisch veld in elke richting te voelen: op en neer, links en rechts, voor en achter. Gewapend met een beetje magnetische kennis verschaffen de metingen van deze drie sensoren voldoende informatie over de hoogte en positie van de zwevende magneet.
Wanneer de zwevende magneet naar de zijkant kantelt, kan het systeem dit aan deze ingangen waarnemen en de rechter elektromagneet inschakelen om hem een corrigerende duw te geven.
Control

Dit apparaat heeft drie sensoren en vier afzonderlijk aangestuurde elektromagneten. Laten we eens kijken naar een klein deel van het systeem om een idee te krijgen van wat er aan de hand is. We hebben een oscilloscoop aangesloten op twee interessante punten:
- De spanning uit een van de sensoren die zijwaarts wijst (niet de up-down sensor), en
- De spanning op een van de spoelen (in diezelfde richting).
Het sensorsignaal, weergegeven in geel, is erg ruisachtig. Negeer de ruis echter en kijk alleen naar het algemene spanningsniveau. We zagen dat het hoger of lager wordt, afhankelijk van de positie van de magneet. Het ligt rond de 1,75 volt, maar verandert een heel klein beetje als we op de magneet drukken. De veranderingen zijn slechts enkele millivolts, zelfs wanneer we de magneet drastisch rondduwen.
Het blauwe signaal toont de spanning op een van de elektromagneetspoelen. Het gaat tot ongeveer 2,5 V en weer terug naar nul. Het is of aan of uit. Hij schakelt elke 1/100.000ste seconde aan.
In plaats van de sterkte aan te passen, varieert het regelcircuit hoe lang het die spoel laat branden gedurende die 1/100.000ste seconde. Als het niet veel druk nodig heeft, is het misschien 5% van de tijd aan. Als we de zwevende magneet aanraken, blijft hij langer aan. Dat zie je aan de breedte van het opgaande signaal.
Deze aansturing van de elektromagneet gaat aan en uit bij 100 kHz. Dat is 100 kiloHertz, of 100.000 keer per seconde. Dat is echt snel!
We hadden gehoopt dit signaal in een luidspreker te kunnen stoppen, zodat we het als geluid zouden kunnen horen. Het zou leuk zijn om die interactieve audio-feedback te horen. Helaas, 100 kHz is ver boven de hoogste frequentie die mensen kunnen horen. Het is zelfs boven het vermogen van een hond om het te horen! We zouden het signaal moeten downsamplen, of dolfijnen vragen wat ze ervan vinden.
Dit is een blik op slechts één sensor en één van de vier elektromagneten. De andere drie werken op soortgelijke wijze om kantelen in de andere richtingen tegen te gaan.
Naast het gebruik van de vier elektromagneten afzonderlijk om te voorkomen dat de drijvende magneet in welke richting dan ook wegkantelt, moet het hele systeem ook het algehele signaalniveau naar alle vier de elektromagneten regelen. Dat gaat de hoogte van de zwevende magneet boven de basis beïnvloeden.
Conclusies
We hebben veel plezier gehad om uit te zoeken hoe dit apparaat werkt. Hoe meer we te weten kwamen, hoe meer we onderwerpen tegenkwamen waar we niet eens aan gedacht hadden. Bijvoorbeeld:
- Het systeem is gevoelig voor het gewicht van de zwevende magneet. Als het te licht is, zal het niet goed werken. Het heeft een minimumgewicht nodig voor de opstelling.
- Er zit een stalen ring boven de dunne drijvende magneet. Deze zorgt voor ballast, maar heeft ook invloed op de vorm van het magnetisch veld. Bij sommige tests bleek dat we geen magneet konden laten drijven zonder deze stalen schijf erbovenop, die het veld afvlakt. Waarom werkt deze opstelling zo goed? Waarom niet gewoon een magneet met non-ferro ballast?
We hebben vaak geprobeerd uit te leggen hoe ingewikkeld magnetische levitatie kan zijn, we hadden geen idee hoeveel meer er bij komt kijken!
Addendum: Een veel eenvoudiger systeem

We hebben een levitatieset die we jaren geleden hebben aangeschaft en die een veel eenvoudiger opzet heeft. Kijk eens naar de ART TEC Magnetic Levitation Kit van Guy Marsden.
Deze opstelling draait het systeem om, waardoor het een stuk eenvoudiger wordt. Het heeft een enkele elektromagneet gepositioneerd boven de drijvende magneet. De elektromagneet klapt aan en uit om de verticale positie van de magneet te regelen.
Omdat de magneet beneden “hangt”, heeft hij de neiging van nature stabiel te zijn van links naar rechts. Net als een lange stok die naar beneden hangt, krijg je natuurlijke stabiliteit in deze configuratie. Het systeem hoeft niets bijzonders te doen om de zijdelingse beweging te controleren.
We hebben deze ook aan de oscilloscoop gehangen en een ander regelschema gevonden. In plaats van het in- en uitschakelen van de elektromagneet met vaste intervallen, schakelt hij in en uit wanneer nodig, reagerend op de meting van de sensor. Als de magneet te laag wordt, wordt hij ingeschakeld om hem omhoog te trekken. Als de magneet te hoog wordt, gaat hij uit.
De frequentie van dit aan- en uitschakelen varieert, afhankelijk van wat de sensor zegt. We ontdekten dat de frequentie veranderde toen we probeerden verschillende magneten en/of verschillende gewichten eraan te hangen.
Wanneer je elektronische producten ziet die iets laten zweven met behulp van een van deze twee basisopstellingen, kun je er meestal achter komen welke het is. Als er iets boven het zwevende voorwerp is, is het dit tweede, eenvoudigere systeem. Als er niets boven de zwever is, is het de eerste.