Como o controlador P-Only, o algoritmo Proporcional-Integral (PI) calcula e transmite um sinal de saída do controlador (CO) a cada vez que a amostra, T, para o elemento de controle final (por exemplo, válvula, bomba de velocidade variável). O CO computado do algoritmo PI é influenciado pelos parâmetros de ajuste do controlador e o erro do controlador, e(t).
PI os controladores têm dois parâmetros de ajuste a ajustar. Embora isso os torne mais desafiadores do que um controlador P-Only, eles não são tão complexos quanto os três parâmetros do controlador PID.
Acção integral permite que os controladores PI eliminem o offset, uma grande fraqueza de um controlador P-only. Assim, os controladores PI fornecem um equilíbrio de complexidade e capacidade que os torna de longe o algoritmo mais amplamente utilizado em aplicações de controle de processo.
O Algoritmo PI
Apesar de diferentes fornecedores lançarem o que é essencialmente o mesmo algoritmo em formas diferentes, aqui exploramos o que é descrito de várias maneiras como a forma dependente, ideal, contínua, de posição:

Onde:
CO = sinal de saída do controlador (a saída do fio)
CObias = polarização do controlador ou valor nulo; set by bumpless transfer as explained below
e(t) = erro do controlador atual, definido como SP – PV
SP = set point
PV = variável de processo medida (o fio de entrada)
Kc = ganho do controlador, um parâmetro de ajuste
Ti = tempo de reset, um parâmetro de ajuste
Os dois primeiros termos à direita do sinal de igual são idênticos ao controlador P-Only referenciado na parte superior deste artigo.
O modo integral do controlador é o último termo da equação. A sua função é integrar ou somar continuamente o erro do controlador, e(t), ao longo do tempo.
Algumas coisas devemos saber sobre o parâmetro de ajuste do tempo de reset, Ti:
| ▪ | Dispõe um peso separado ao termo integral para que a influência da ação integral possa ser ajustada independentemente. |
| ▪ | Está no denominador para que valores menores forneçam um peso maior para (ou seja aumentar a influência de) o termo integral. |
| ▪ | Tem unidades de tempo de modo que é sempre positivo. |
Função do termo proporcional
Como com o controlador P-Only, o termo proporcional do controlador PI, Kc-e(t), adiciona ou subtrai do CObias baseado no tamanho do erro do controlador e(t) a cada vez que t.
Como e(t) cresce ou encolhe, a quantidade adicionada ao CObias cresce ou encolhe imediatamente e proporcionalmente. O histórico passado e a trajetória atual do erro do controlador não têm influência no cálculo do termo proporcional.
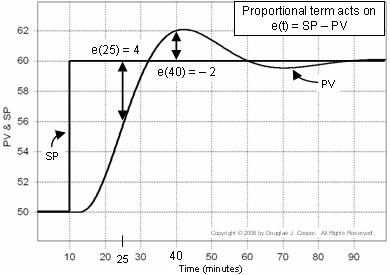
O gráfico abaixo (clique para uma visão ampla) ilustra esta idéia para uma resposta de set point. O erro usado no cálculo proporcional é mostrado no gráfico:
▪ No tempo t = 25 min, e(25) = 60-56 = 4
▪ No tempo t = 40 min, e(40) = 60-62 = -2
Recordando o erro do controlador e(t) = SP – PV, ao invés de vermos PV e SP como traços separados como fazemos acima, podemos calcular e plotar e(t) em cada ponto do tempo t.
Below (clique para uma vista grande) é o dado idêntico ao acima apenas é reformulado como um gráfico do próprio e(t). Note que no gráfico acima, PV = SP = 50 para os primeiros 10 min, enquanto no gráfico de erro abaixo, e(t) = 0 para o mesmo período de tempo.
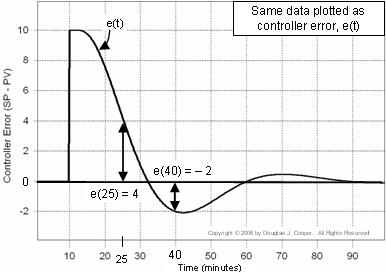
Este gráfico é útil pois nos ajuda a visualizar como o erro do controlador muda continuamente de tamanho e sinal à medida que o tempo passa.
Função do termo integral
Embora o termo proporcional considere o tamanho atual do e(t) somente no momento do cálculo do controlador, o termo integral considera o histórico do erro, ou quanto tempo e distância a variável de processo medida esteve do set point ao longo do tempo.
Integração é uma soma contínua. A integração do erro ao longo do tempo significa que somamos o histórico completo de erros do controlador até o momento atual, a partir de quando o controlador foi comutado para automático pela primeira vez.
O erro do controlador é e(t) = SP – PV. No gráfico abaixo (clique para uma vista grande), a soma integral do erro é calculada como as áreas sombreadas entre os traços SP e PV.
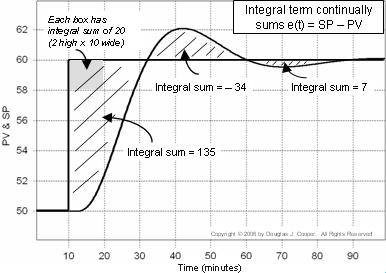
Cada caixa no gráfico tem uma soma integral de 20 (2 de altura por 10 de largura). Se contarmos o número de caixas (incluindo frações de caixas) contidas nas áreas sombreadas, podemos computar a soma integral do erro.
Então quando a PV cruza pela primeira vez o set point em cerca de t = 32, a soma integral cresceu para cerca de 135. Escrevemos o termo integral do controlador PI como:
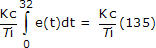
Desde que é o erro do controlador que conduz o cálculo, obtemos uma visão direta da situação a partir de um gráfico de erro do controlador como mostrado abaixo (clique para uma visão grande):
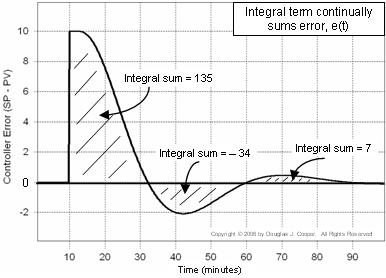
Note que a integral de cada porção sombreada tem o mesmo sinal que o erro. Como a soma integral começa a acumular quando o controlador é colocado em automático pela primeira vez, a soma integral total cresce enquanto e(t) é positiva e encolhe quando é negativa.
No tempo t = 60 min nas parcelas, a soma integral é 135 – 34 = 101. A resposta é largamente estabelecida em t = 90 min, e a soma integral é então 135 – 34 + 7 = 108.
Acção Integral Elimina a Compensação
A frase anterior faz uma observação subtil mas muito importante. A resposta é em grande parte completa no tempo t = 90 min, mas a soma integral de todos os erros não é zero.
Neste exemplo, a soma integral tem um valor final ou residual de 108. É este valor residual que permite a ação integral do controlador PI para eliminar o offset.
Como discutido em um artigo anterior, a maioria dos processos sob controle apenas P experimenta offset durante a operação normal. Offset é um valor sustentado para erro do controlador (ou seja, PV não é igual a SP em estado estável).
Reconhecemos do controlador P-Only:

que CO será sempre igual a CObias a menos que adicionemos ou subtraamos algo dele.
A única maneira de termos algo para adicionar ou subtrair de CObias na equação P-Only acima é se e(t) não for zero. Ele e(t) não é constante em zero, então PV não é igual a SP e temos offset.
No entanto, com o controlador PI:
sabemos agora que a soma integral do erro pode ter um valor final ou residual após uma resposta estar completa. Isto é importante porque significa que e(t) pode ser zero, mas ainda podemos ter algo para adicionar ou subtrair do CObias para formar a saída final do controlador, CO.
Então, enquanto houver qualquer erro (enquanto e(t) não for zero), o termo integral irá crescer ou encolher de tamanho para impactar o CO. As mudanças no CO só cessarão quando PV for igual a SP (quando e(t) = 0) por um período de tempo sustentado.
Nesse ponto, o termo integral pode ter um valor residual como acabamos de discutir. Este valor residual da integração, quando adicionado ao CObias, cria essencialmente um novo valor de viés global que corresponde ao novo nível de operação.
Na verdade, a ação integral repõe continuamente o valor de viés para eliminar o desvio à medida que o nível de operação muda.
Desafios do PI Control
Existem desafios no emprego do algoritmo PI:
| ▪ | Os dois parâmetros de afinação interagem entre si e a sua influência deve ser equilibrada pelo designer. |
| ▪ | O termo integral tende a aumentar o comportamento oscilatório ou rolante da resposta do processo. |
Porque os dois parâmetros de afinação interagem um com o outro, pode ser um desafio chegar aos “melhores” valores de afinação. O valor e importância do nosso projeto e receita de ajuste aumenta à medida que o controlador se torna mais complexo.
Initizar o controlador para transferência sem problemas
Quando mudamos qualquer controlador do modo manual para o automático (de loop aberto para loop fechado), queremos que o resultado seja sem problemas. Ou seja, não queremos que a comutação cause ações bruscas de controle que impactem ou interrompam nosso processo
Atingimos este resultado desejado na comutação inicializando a soma integral do erro do controlador para zero. Além disso, o set point e o valor de polarização do controlador são inicializados pela configuração:
▪ SP igual à PV atual
▪ CObias igual à CO atual
Com a soma integral do erro definida para zero, não há nada a adicionar ou subtrair das CObias que causaria uma mudança brusca na saída do controlador atual. Com o set point igual à variável de processo medida, não há erro para acionar uma alteração na nossa CO. E com o viés do controlador definido para nosso valor atual de CO, estamos preparados por padrão para manter a operação atual.
Assim, quando passamos do modo manual para automático, temos “transferência sem problemas” sem surpresas. Este é um resultado que todos apreciam.
Tempo de reinicialização versus taxa de reinicialização
Diferentes fornecedores lançam seus algoritmos de controle em formas ligeiramente diferentes. Alguns usam banda proporcional em vez do ganho do controlador. Alguns também usam taxa de reset, Tr, ao invés de tempo de reset. Estes são simplesmente o inverso um do outro:
Tr = 1/Ti
Não importa como os parâmetros de ajuste são expressos, os algoritmos PI são todos igualmente capazes.
Mas é crítico conhecer o seu fabricante antes de começar a ajustar o seu controlador porque os valores dos parâmetros devem ser ajustados à forma particular do seu algoritmo.O software comercial para projeto e ajuste do controlador resolverá automaticamente este problema para você.
Implementando um controlador PI
Exploramos o projeto, ajuste e implementação do controlador PI no trocador de calor neste artigo e os tanques drenados por gravidade neste artigo.