Elektromagnetická levitace

Může magnet levitovat nebo se vznášet nad jiným magnetem? Proč ne – zdá se, že by to mělo fungovat!
Naneštěstí nelze přimět magnet, aby se magicky vznášel ve vzduchu nad jiným magnetem. Přinejmenším to platí, pokud používáte jen pár silných magnetů. V našem článku Základy magnetů jsme zmínili Earnshawovu větu, důkaz pocházející z 19. století, který dokazuje, že to nebude fungovat bez ohledu na to, kolik magnetů do systému přidáte.
A co když mají magnety tvar misky? Nebo se přidá další magnet po straně? Ne. Earnshaw.
Prozkoumejme systém, který nějakým způsobem obchází starého Earnshawa a dokáže udržet magnet stabilně se vznášející ve vzduchu. Dokonce dokáže udržet i malé množství závaží!
Vydržte – dál už to bude složitější.
Nejprve se podívejme, jak to funguje!
Výrobky založené na tomto systému


Viděli jsme řadu výrobků, které tento systém používají. Zdá se, že tyto věci přitahují pozornost sociálních médií. Viděli jsme levitující glóby, kde země nějakým způsobem levituje ve vzduchu.
Viděli jsme dokonce stejnou techniku použitou k levitaci malého stromku bonsaje! To je super.
Jak to funguje? Rozebereme si to krok za krokem.
Začneme jednoduše

Základní myšlenkou je přimět magnet, aby se vznášel, tím, že ho přidržíme odpudivou silou jiného magnetu. Magnety se mohou navzájem odpuzovat dostatečnou silou. Mít dostatečnou sílu k levitaci není problém.
Problém je v tom, že toto uspořádání není stabilní. Vznášející se magnet má tendenci se otáčet a přetáčet se, aby se přitahoval k druhému magnetu.
To platí, i když misku vyložíte spoustou magnetů, protože Earnshaw.
Stabilita, inženýrský styl


Určitě si na chvíli definujme, co myslíme stabilitou. Stabilní systém je něco, co je vyvážené, ale zároveň má tendenci vrátit se do středové, vyvážené polohy, pokud do něj trochu narazíte.
Jako příklad si vezměme dlouhou tyč nebo klacek držený shora. Je stabilní, když visí přímo dolů. Pokud ji zespodu odstrčíme z polohy rovně dolů, gravitace bude mít tendenci ji přitáhnout zpět do stabilní polohy.
Jistě, při prvním zhoupnutí nemusí zapadnout na místo. Bude se chvíli houpat sem a tam a postupně se bude zkracovat, až se ustálí. Nakonec má tendenci se vrátit zpět.
Nestabilní systém je něco, co může být vyvážené, ale pokud se dostane z rovnováhy, má tendenci se ještě více vyvažovat. Zvažte, zda držíte stejnou tyč s rukou drženou naplocho dole. Je možné ji vyvážit, ale když se hůl vychýlí z rovnováhy, má tendenci se více vychylovat z rovnováhy.
Takovou hůl můžete držet, ale pouze tak, že budete neustále upravovat polohu ruky, abyste ji udrželi v rovnováze. Sleduješ a cítíš, na kterou stranu padá, a reaguješ pohybem ruky proti tomu. Sleduješ a reaguješ, což se neustále opakuje. Zajímavé je, že sestava levitujícího magnetu funguje podobně.
Elektromagnety, senzory, zpětná vazba a řízení
Vraťme se k levitaci magnetu. Jak ho toto zařízení udrží v klidu?
Kromě odpuzujících magnetů má tento levitátor čtyři elektromagnety. Pokud se plovoucí magnet nakloní na jednu stranu, může rychle zapnout elektromagnet, který ho odpudí zpět do středové polohy. Pokud systém dokáže reagovat dostatečně rychle, lze elektromagnety zapínat a vypínat podle potřeby, aby udržely magnet ve stabilní poloze. Příjemné na elektromagnetech je, že jsou spouštěny proudem procházejícím vodičem. Pokud víte, jak věci zapínat a vypínat pomocí elektroniky, máte k dispozici prostředek, jak elektromagnety rychle a přesně ovládat.
Tento systém neporušuje Earnshawovu větu, protože nepoužívá nějaký počet permanentních (vždy zapnutých) magnetů k udržení plovoucího magnetu. Má aktivně řízené magnety, které se zapínají a vypínají, reagují na nesprávné nastavení a korigují nestabilitu.
Dočasné magnety
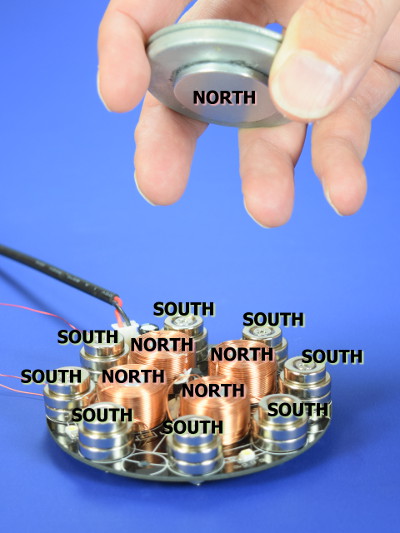
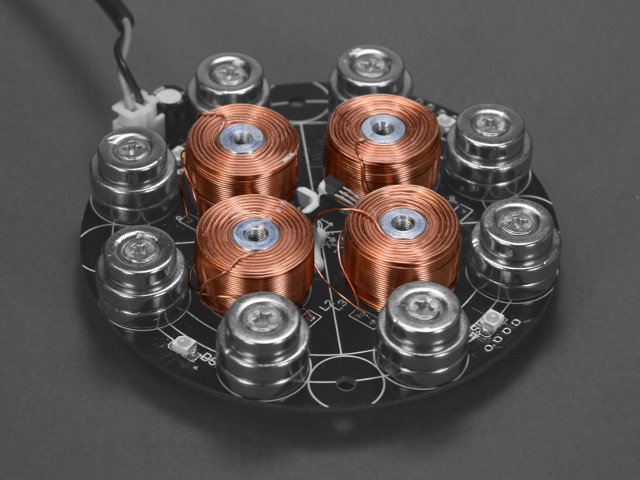
Nejprve se blíže podívejme na zvláštní uspořádání použité v základně této věci. Když je napájení vypnuté, kde jsou magnety a na kterou stranu směřují? Existují tři různá místa, kde bychom se měli podívat na směr magnetizace:
- Vidíme řadu magnetů uspořádaných do kruhu kolem vnější strany. Všechny jsou orientovány svými jižními póly směrem nahoru.
- Na dně plovoucího magnetu je jeden diskový magnet, orientovaný svým severním pólem směrem dolů.
- Jsou zde čtyři elektromagnety, cívky z izolovaného drátu ovinuté kolem ocelových hřídelí. Díky poli blízkého prstence magnetů jsou tato ocelová jádra dočasně zmagnetována a chovají se jako magnety se severními póly směřujícími nahoru.
Počkat, co se děje v té poslední části? Nejsou to magnety, ale jsou to magnety?“

Ocel nebo železo mohou působit jako dočasný magnet. Když na ni působí magnetické pole (přiložíte k ní nebo do její blízkosti magnet), pole prochází ocelí kanály, takže se ocel chová jako magnet (dokud je tam tento magnet). Je to jako trik se sponkami, kdy sponka s přilepeným magnetem může zvednout jinou sponku, protože se chová jako magnet. Můžeme se podívat na ocelovou sponku a říci, že má severní a jižní pól.

Ocelový šroub se chová jako magnet, když se ho dotýká neodymový magnet. Ocelový šroub se může chovat jako magnet také jen tím, že je v jeho blízkosti neodymový magnet. Přesně to se děje v tomto zařízení. Tato ocelová jádra se chovají jako magnety, jejichž severní póly směřují nahoru a odpuzují severní pól plovoucího magnetu.
Při zapnutí mohou elektromagnety podle potřeby přidávat na síle těchto magnetů.
Systém není sám o sobě stabilní. Pokud se pokusíte plovoucí magnet vyvážit bez zapnutí zařízení, rychle se utrhne na stranu.
Proč bylo pro tuto konstrukci zvoleno tak zdánlivě složité uspořádání? Dobrá otázka. Domníváme se, že by to mohlo mít něco společného s vytvořením širší oblasti, kde může být plovoucí magnet téměř stabilní, usazený v „misce“ magnetického pole jdoucí od severních pólů uprostřed, nahoru přes a dolů do jižních pólů na vnější straně.
Senzory
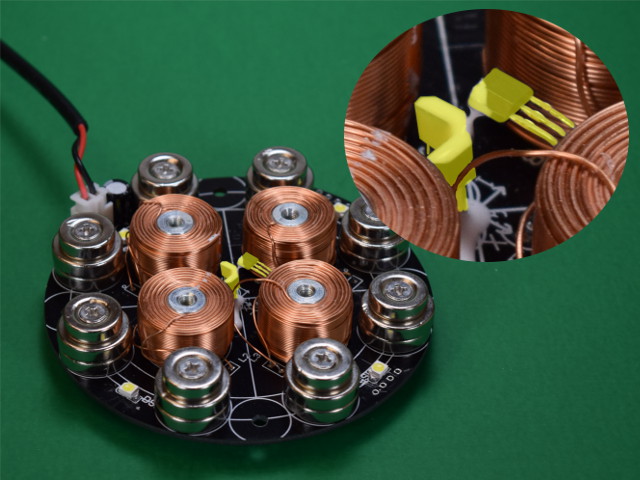
Pro správné řízení elektromagnetů potřebuje zařízení způsob, jak přesně snímat polohu plovoucího magnetu. Musí zaznamenat sebemenší změnu polohy, aby mohlo rychle reagovat.
V tomto zařízení jsou použity tři ratiometrické snímače s Hallovým jevem. V předchozím článku o snímačích s Hallovým jevem jsme se zabývali jednoduchými zařízeními, která jsou v podstatě vypínači. Pokud „vidí“ magnetické pole, které je silnější než určitá intenzita, sepnou se.
Zde použité ratiometrické senzory jsou jiné. Místo senzoru, který sepne nebo vypne při určité intenzitě pole, dodávají malé čipy napětí, které se mění podle intenzity magnetického pole, které vidí. Pokud magnetické pole zesílí, napětí se zvýší. Jsou skvělé pro snímání drobných změn intenzity magnetického pole.
Ve středu zařízení jsou umístěny tři tyto senzory. Jsou orientovány tak, aby snímaly magnetické pole v jednotlivých směrech: nahoru a dolů, doleva a doprava, dopředu a dozadu. Vyzbrojeny trochou magnetických znalostí poskytují údaje z těchto tří snímačů dostatek informací o výšce a poloze plovoucího magnetu.
Když se plovoucí magnet vychýlí do strany, systém to dokáže z těchto vstupů vycítit a zapnout pravý elektromagnet, aby mu dodal korekční impuls.
Kontrola

Toto zařízení má tři senzory a čtyři samostatně ovládané elektromagnety. Podívejme se jen na malou část systému, abychom si udělali představu o tom, co se děje. Připojili jsme osciloskop ke dvěma zajímavým bodům:
- Napětí vycházející z jednoho ze senzorů směřujícího do strany (nikoliv senzor nahoru-dolů) a
- Napětí na jedné z cívek (ve stejném směru).
Signál senzoru, zobrazený žlutě, je velmi šumivý. Šum však ignorujte a podívejte se pouze na celkovou úroveň napětí. Viděli jsme, že se zvyšuje nebo snižuje v závislosti na poloze magnetu. Pohybuje se kolem 1,75 V, ale nepatrně se mění, jak jsme na magnet tlačili. Změny jsou jen několik milivoltů, i když na magnet drasticky tlačíme.
Modrý signál ukazuje napětí na jedné z cívek elektromagnetu. Zvyšuje se asi na 2,5 V a zase se vrací na nulu. Je buď zapnutý, nebo vypnutý. Zapíná se každou 1/100 000 sekundy.
Řídicí obvody spíše než nastavování síly mění, jak dlouho nechá tuto cívku během této 1/100 000 sekundy zapnutou. Pokud nepotřebuje moc tlačit, je zapnutá třeba 5 % času. Když se dotkneme plovoucího magnetu, zůstane zapnutá déle. Můžete to vidět na šířce signálu up-time.
Toto ovládání elektromagnetu se zapíná a vypíná s frekvencí 100 kHz. To je 100 kilohertzů neboli 100 000krát za sekundu. To je opravdu rychlé!“
Doufali jsme, že tento signál připojíme k reproduktoru, abychom ho mohli slyšet jako zvuk. Bylo by hezké slyšet tu interaktivní zvukovou zpětnou vazbu. Bohužel 100 kHz je daleko nad nejvyšší frekvencí, kterou člověk slyší. Je to dokonce nad schopností psa ji slyšet! Museli bychom buď signál snížit, nebo se zeptat nějakých delfínů, co si o tom myslí.
To je pohled jen na jeden senzor a jeden ze čtyř elektromagnetů. Ostatní tři pracují podobným způsobem, aby působily proti náklonům v ostatních směrech.
Kromě toho, že se čtyři elektromagnety používají jednotlivě, aby zabránily vychýlení plovoucího magnetu v jakémkoli směru, musí celý systém také řídit celkovou úroveň signálu do všech čtyř elektromagnetů. To ovlivní výšku plovoucího magnetu nad základnou.
Závěry
Užili jsme si spoustu zábavy, když jsme se snažili zjistit, jak toto zařízení funguje. Čím více jsme na to přicházeli, tím více jsme nacházeli celá témata, o kterých jsme ani neuvažovali. Například:
- Systém je citlivý na hmotnost plovoucího magnetu. Pokud je příliš lehký, nebude dobře fungovat. Potřebuje nějakou minimální hmotnost pro způsob nastavení.“
- Nad tenkým plovoucím magnetem je ocelová podložka. Ta samozřejmě poskytuje balast, ale má také skutečný vliv na tvar magnetického pole. Při některých testech jsme zjistili, že bez tohoto ocelového kotouče nahoře nemůžeme dosáhnout toho, aby magnet plaval a zplošťoval pole. Proč toto uspořádání tak dobře funguje? Proč nestačí jen magnet s neželezným balastem?“
Často jsme se snažili vysvětlit, jak složitá může být magnetická levitace, netušili jsme, kolik toho ještě zahrnuje!“
Dodatek: Mnohem jednodušší systém

Máme levitační soupravu, kterou jsme získali před lety a která má mnohem jednodušší uspořádání. Podívejte se na magnetickou levitační soupravu ART TEC od Guye Marsdena.
Toto nastavení převrací systém vzhůru nohama, takže je vše mnohem jednodušší. Má jediný elektromagnet umístěný nad plovoucím magnetem. Elektromagnet se překlopí a vypne, čímž se ovládá svislá poloha magnetu.
Protože magnet „visí“ dole, bývá přirozeně stabilní ze strany na stranu. Stejně jako dlouhý pól visící dolů získáte v této konfiguraci přirozenou stabilitu. Systém nemusí dělat nic fantastického, aby řídil boční pohyb.
Tento jsme také připojili k osciloskopu a zjistili jsme jiné schéma řízení. Namísto zapínání a vypínání elektromagnetu v pevně stanovených intervalech se zapíná a vypíná podle potřeby a reaguje na měření senzoru. Když magnet začne klesat příliš nízko, zapne se, aby ho vytáhl nahoru. Když se magnet začne dostávat příliš vysoko, vypne se.
Frekvence tohoto zapínání a vypínání se mění podle toho, co říká senzor. Zjistili jsme, že frekvence se mění, když na něj zkoušíme zavěšovat různé magnety a/nebo různá závaží.
Když vidíte elektronické výrobky, které něco levitují pomocí jednoho z těchto dvou základních nastavení, obvykle můžete zjistit, které z nich to je. Pokud je nad vznášejícím se předmětem něco umístěno, jedná se o tento druhý, jednodušší systém. Pokud nad vznášejícím se předmětem nic není, jedná se o první systém.
.