Lévitation électromagnétique

Un aimant peut-il léviter ou flotter au-dessus d’un autre aimant ? Pourquoi pas – il semble que cela devrait fonctionner !
Malheureusement, vous ne pouvez pas faire flotter magiquement un aimant dans l’air au-dessus d’un autre aimant. Du moins, c’est vrai si vous utilisez juste une paire d’aimants puissants. Dans notre article sur les bases des aimants, nous avons mentionné le théorème d’Earnshaw, une preuve datant des années 1800 qui prouve que cela ne fonctionnera pas, quel que soit le nombre d’aimants que vous ajoutez au système.
Mais que se passe-t-il si les aimants ont la forme d’un bol ? Ou qu’un autre aimant est ajouté sur le côté ? Non. Earnshaw.
Examinons un système qui contourne d’une manière ou d’une autre le vieil Earnshaw, et parvient à maintenir un aimant flottant régulièrement dans l’air. Il peut même supporter une petite quantité de poids !
Attendez, les choses se compliquent à partir de là.
D’abord, voyons-le en action !
Produits basés sur ce système


Nous avons vu un certain nombre de produits qui utilisent ce système. Ces choses semblent attirer l’attention des médias sociaux. Nous avons vu des globes en lévitation, où la terre lévite dans l’air en quelque sorte.
Nous avons même vu la même technique utilisée pour faire léviter un petit bonsaï ! Trop cool.
Comment cela fonctionne-t-il ? Décomposons-le étape par étape.
Début simple

L’idée de base est de faire flotter un aimant en le maintenant avec la force de répulsion d’un autre aimant. Les aimants peuvent se repousser mutuellement avec une force suffisante. Avoir assez de force pour le faire léviter n’est pas le problème.
Le problème est que cette configuration n’est pas stable. L’aimant flottant a tendance à tourner autour, à se retourner pour s’attirer vers l’autre aimant.
C’est vrai même si vous tapissez un bol avec un tas d’aimants, car Earnshaw.
Stabilité, style ingénieur


Prenons un moment pour définir ce que nous entendons par stabilité. Un système stable est quelque chose qui est équilibré, mais qui a aussi tendance à revenir à la position centrée et équilibrée si vous le bousculez un peu.
Par exemple, considérez un long bâton ou une perche, tenu par le haut. C’est stable, suspendu directement vers le bas. Si nous poussons le bas loin d’une position droite vers le bas, la gravité aura tendance à le ramener vers la position stable.
Bien sûr, il pourrait ne pas se mettre en place dès le premier balancement. Il se balancera d’avant en arrière pendant un peu, avec des balancements successivement plus courts à mesure qu’il se stabilise. Il a tendance à revenir en arrière éventuellement.
Un système instable est quelque chose qui peut être équilibré, mais s’il se déséquilibre, il a tendance à devenir plus déséquilibré. Considérez le fait de tenir le même bâton avec votre main tenue à plat en bas. Il est possible de l’équilibrer, mais lorsque le bâton se déséquilibre, il a tendance à tomber plus déséquilibré.
Vous pouvez tenir un bâton comme cela, mais seulement en ajustant constamment la position de votre main pour le maintenir en équilibre. Vous regardez et sentez de quel côté il tombe, réagissez en déplaçant votre main pour le contrer. Vous observez et réagissez, en répétant sans cesse. Il est intéressant de noter que le montage de l’aimant en lévitation fonctionne à peu près de la même manière.
Electro-aimants, capteurs, rétroaction et contrôle
Revenons à la lévitation d’un aimant. Comment ce dispositif le maintient-il stable ?
En plus de repousser les aimants, ce lévitateur possède quatre électro-aimants. Si l’aimant flottant bascule dans un sens, il peut rapidement allumer un électroaimant pour le repousser dans la position centrée. Si le système peut réagir assez rapidement, les électro-aimants peuvent être activés et désactivés si nécessaire pour maintenir l’aimant stable. L’avantage des électro-aimants, c’est qu’ils fonctionnent avec un courant dans le fil. Si vous savez comment allumer et éteindre les choses avec l’électronique, vous avez un moyen de contrôler l’électroaimant rapidement et précisément.
Ce système ne viole pas le théorème d’Earnshaw car il n’utilise pas un certain nombre d’aimants permanents (toujours allumés) pour maintenir l’aimant flottant. Il a des aimants contrôlés activement qui sont allumés et éteints, répondant au désalignement et corrigeant l’instabilité.
Amants temporaires
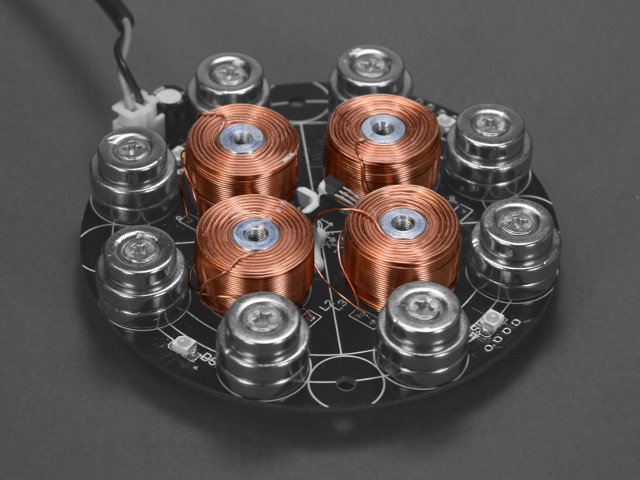
D’abord, regardons de plus près la configuration étrange utilisée dans la base de cette chose. Avec le courant éteint, où sont les aimants et dans quelle direction sont-ils orientés ? Il y a trois endroits différents où nous devons regarder la direction de la magnétisation :
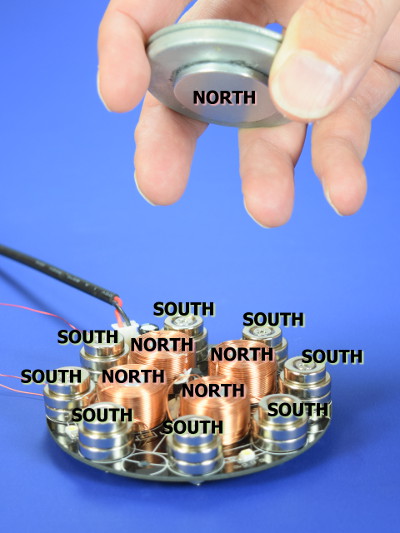
- Nous voyons une série d’aimants disposés en anneau autour de l’extérieur. Ils sont tous orientés avec leurs pôles sud vers le haut.
- Il y a un seul aimant en forme de disque sur le fond de l’aimant flottant, orienté avec son pôle nord vers le bas.
- Il y a quatre électroaimants, des bobines de fil isolé enroulées autour d’arbres en acier. En raison du champ de l’anneau d’aimants voisin, ces noyaux d’acier sont temporairement magnétisés, agissant comme des aimants avec leurs pôles nord orientés vers le haut.
Attendez, que se passe-t-il dans cette dernière partie ? Ce ne sont pas des aimants mais ils le sont ?

L’acier ou le fer peuvent agir comme un aimant temporaire. Lorsqu’un champ magnétique lui est appliqué (coller un aimant dessus ou à proximité), le champ canalise à travers l’acier, faisant agir l’acier comme un aimant (tant que cet aimant est là). C’est un peu comme le tour des trombones : un trombone sur lequel on a collé un aimant peut attraper un autre trombone, car il agit comme un aimant. Nous pouvons regarder le trombone en acier et dire qu’il a un pôle nord et un pôle sud.

Un boulon d’acier agit comme un aimant lorsqu’un aimant en néodyme le touche. Un boulon d’acier peut aussi agir comme un aimant simplement en ayant un aimant en néodyme près de lui. C’est ce qui se passe ici dans ce dispositif. Ces noyaux d’acier agissent comme des aimants avec leurs pôles nord orientés vers le haut, repoussant le pôle nord de l’aimant flottant.
Lorsqu’ils sont sous tension, les électroaimants peuvent ajouter à la force de ces aimants si nécessaire.
Le système n’est pas stable par lui-même. Si vous essayez d’équilibrer l’aimant flottant sans mettre le dispositif sous tension, il se détache rapidement sur le côté.
Pourquoi une configuration aussi complexe en apparence a-t-elle été choisie pour cette conception ? Bonne question. Nous pensons que cela pourrait avoir quelque chose à voir avec la fabrication d’une zone plus large où l’aimant flottant peut être presque stable, placé dans le « bol » du champ magnétique allant des pôles nord au milieu, en haut au-dessus et en bas dans les pôles sud à l’extérieur.
Capteurs
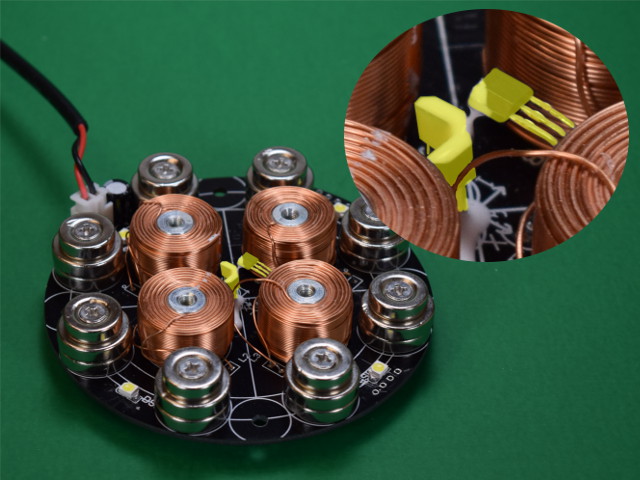
Pour contrôler correctement les électroaimants, le dispositif a besoin d’un moyen de détecter avec précision la position de l’aimant flottant. Il doit remarquer le plus petit changement de position afin de pouvoir réagir rapidement.
Dans ce dispositif, trois capteurs ratiométriques à effet Hall sont utilisés. Dans un article précédent sur les capteurs à effet Hall, nous avons examiné des dispositifs simples qui sont essentiellement des interrupteurs marche/arrêt. S’ils « voient » un champ magnétique supérieur à une certaine intensité, ils s’allument.
Les capteurs ratiométriques utilisés ici sont différents. Au lieu d’un capteur qui s’allume ou s’éteint à une certaine intensité de champ, les minuscules puces fournissent une tension qui varie avec l’intensité du champ magnétique qu’elles voient. Si le champ magnétique devient plus fort, la tension augmente. Ils sont parfaits pour détecter de minuscules changements dans l’intensité du champ magnétique.
Il y a trois de ces capteurs situés au centre du dispositif. Ils sont orientés pour détecter le champ magnétique dans chaque direction : haut et bas, gauche et droite, avant et arrière. Armés d’un peu de connaissances magnétiques, les lectures de ces trois capteurs fournissent suffisamment d’informations sur la hauteur et la position de l’aimant flottant.
Lorsque l’aimant flottant bascule sur le côté, le système peut le détecter à partir de ces entrées et allumer l’électroaimant droit pour lui donner une poussée correctrice.
Contrôle

Ce dispositif possède trois capteurs et quatre électroaimants contrôlés séparément. Jetons un coup d’œil à une petite partie du système pour avoir une idée de ce qui se passe. Nous avons branché un oscilloscope sur deux points intéressants :
- La tension sortant d’un des capteurs pointant latéralement (pas le capteur haut-bas), et
- La tension sur une des bobines (dans cette même direction).
Le signal du capteur, représenté en jaune, est très bruyant. Ignorez le bruit, cependant, et regardez simplement le niveau de tension global. Nous avons vu qu’il est plus ou moins élevé selon la position de l’aimant. Elle se situe aux alentours de 1,75 volt, mais change très légèrement lorsque nous appuyons sur l’aimant. Les changements ne sont que de quelques millivolts, même lorsque nous poussons drastiquement l’aimant.
Le signal bleu montre la tension d’une des bobines de l’électroaimant. Il monte à environ 2,5 V et revient à zéro. Il est soit allumé, soit éteint. Elle s’allume tous les 1/100 000e de seconde.
Plutôt que d’ajuster la force, le circuit de contrôle varie combien de temps il laisse cette bobine allumée pendant ce 1/100 000e de seconde. Si elle n’a pas besoin d’être poussée, elle reste allumée 5% du temps. Quand on touche l’aimant flottant, elle reste allumée plus longtemps. Vous pouvez le voir dans la largeur du signal de temps de montée.
Cette commande de l’électroaimant bascule sur et hors tension à 100 kHz. C’est 100 kiloHertz, ou 100 000 fois par seconde. C’est vraiment rapide !
Nous avions espéré accrocher ce signal à un haut-parleur pour nous permettre de l’entendre comme un son. Ce serait chouette d’entendre ce retour audio interactif. Malheureusement, 100 kHz est bien au-dessus de la plus haute fréquence que les humains peuvent entendre. C’est même au-dessus de la capacité d’un chien à l’entendre ! Nous devrions soit sous-échantillonner le signal, soit demander à des dauphins ce qu’ils en pensent.
Voilà un aperçu d’un seul capteur et d’un des quatre électroaimants. Les trois autres fonctionnent de manière similaire pour contrer les inclinaisons dans les autres directions.
En plus d’utiliser les quatre électroaimants individuellement pour empêcher l’aimant flottant de basculer dans n’importe quelle direction, l’ensemble du système doit également contrôler le niveau global du signal vers les quatre électroaimants. Cela va influencer la hauteur de l’aimant flottant au-dessus de la base.
Conclusions
Nous avons eu beaucoup de plaisir à essayer de comprendre le fonctionnement de ce dispositif. Plus nous avons compris, plus nous avons découvert des sujets entiers que nous n’avions même pas envisagés. Par exemple:
- Le système est sensible au poids de l’aimant flottant. S’il est trop léger, il ne fonctionnera pas bien. Il a besoin d’un poids minimum pour la façon dont il est configuré.
- Il y a une rondelle d’acier au-dessus du mince aimant flottant. Cela fournit évidemment du lest, mais cela a aussi un réel effet sur la forme du champ magnétique. Lors de certains tests, nous avons constaté que nous ne pouvions pas faire flotter un aimant sans ce disque d’acier sur le dessus, ce qui aplatit le champ. Pourquoi cet arrangement fonctionne-t-il si bien ? Pourquoi pas simplement un aimant avec un lest non ferreux ?
Nous avons souvent essayé d’expliquer à quel point la lévitation magnétique peut être compliquée, nous n’avions aucune idée de ce que cela impliquait en plus !
Addendum : Un système beaucoup plus simple

Nous avons un kit de lévitation que nous avons acquis il y a des années et qui a une configuration beaucoup plus simple. Consultez le kit de lévitation magnétique ART TEC de Guy Marsden.
Cette configuration renverse le système, rendant les choses beaucoup plus faciles. Il a un seul électroaimant positionné au-dessus de l’aimant flottant. L’électroaimant s’allume et s’éteint pour contrôler la position verticale de l’aimant.
Puisque l’aimant est « suspendu » en dessous, il a tendance à être naturellement stable latéralement. Comme un long poteau suspendu, vous obtenez une stabilité naturelle dans cette configuration. Le système n’a pas besoin de faire quoi que ce soit de sophistiqué pour contrôler le mouvement latéral.
Nous avons également branché celui-ci à l’oscilloscope et avons trouvé un schéma de contrôle différent. Plutôt que d’allumer et d’éteindre l’électroaimant à intervalles fixes, il s’allume et s’éteint selon les besoins, en réagissant à la mesure du capteur. Lorsque l’aimant commence à être trop bas, il s’allume pour le tirer vers le haut. Quand l’aimant commence à devenir trop haut, il s’éteint.
La fréquence de cette mise en marche et de cet arrêt varie en fonction de ce que dit le capteur. Nous avons constaté que la fréquence changeait lorsque nous essayions d’y suspendre différents aimants et/ou différents poids.
Lorsque vous voyez des produits électroniques qui font léviter quelque chose en utilisant l’une de ces deux configurations de base, vous pouvez généralement déterminer de laquelle il s’agit. S’il y a quelque chose au-dessus de l’objet flottant, c’est ce deuxième système, plus simple. S’il n’y a rien au-dessus du flotteur, c’est le premier.