Elektromágneses lebegtetés

A mágnes lebeghet vagy lebeghet egy másik mágnes felett? Miért ne – úgy tűnik, hogy működnie kellene!
Szomorú, hogy nem tudsz egy mágnest varázslatosan a levegőben egy másik mágnes fölé lebegtetni. Legalábbis ez igaz, ha csak egy pár erős mágnest használsz. A Mágneses alapok című cikkünkben említettük az Earnshaw-tételt, egy 1800-as évekből származó bizonyítást, amely bizonyítja, hogy nem fog működni, függetlenül attól, hogy hány mágnest adsz a rendszerhez.
De mi van akkor, ha a mágnesek tál alakúak? Vagy egy másik mágnest adunk hozzá az oldalára? Nem. Earnshaw.
Vizsgáljunk meg egy olyan rendszert, amely valahogy megkerüli az öreg Earnshaw-t, és sikerül egy mágnest stabilan a levegőben lebegve tartani. Még egy kis súlyt is képes megtartani!
Várjunk csak – innentől kezdve a dolgok bonyolultabbá válnak.
Előbb lássuk a gyakorlatban!
Az erre a rendszerre épülő termékek


Egy sor olyan terméket láttunk, amely ezt a rendszert használja. Úgy tűnik, ezek a dolgok megragadják a közösségi média figyelmét. Láttunk lebegő gömböket, ahol a föld valahogy lebeg a levegőben.
Még egy kis bonsai fa lebegtetésére is láttunk ugyanezt a technikát! Annyira király.
Hogyan működik? Bontsuk le lépésről lépésre.
A kezdés egyszerű

Az alapötlet az, hogy egy mágnest egy másik mágnes taszító erejével tartva lebegővé teszünk. A mágnesek kellő erővel taszíthatják egymást. A lebegtetéshez elegendő erővel nem az a probléma.
A probléma az, hogy ez a felállás nem stabil. A lebegő mágnes hajlamos körbefordulni, megfordítva magát, hogy vonzza a másik mágnest.
Ez akkor is igaz, ha egy tálat kibélelünk egy csomó mágnessel, mert Earnshaw.
Szabályozhatóság, mérnöki stílus


Meghatározzuk egy pillanatra, hogy mit értünk stabilitás alatt. A stabil rendszer olyan valami, ami egyensúlyban van, de hajlamos arra is, hogy visszatérjen a középre állított, kiegyensúlyozott helyzetbe, ha egy kicsit megdöngetjük.
Példaként gondoljunk egy hosszú botra vagy rúdra, amit felülről tartunk. Egyenesen lefelé lógva stabil. Ha az alját eltoljuk az egyenesen lefelé tartó helyzetből, a gravitáció hajlamos visszahúzni a stabil helyzetbe.
Naná, hogy nem biztos, hogy az első lendítésnél a helyére pattan. Egy darabig előre-hátra fog lengeni, majd egymás után egyre rövidebb lengésekkel, ahogy elhelyezkedik. Végül hajlamos visszatérni.
Az instabil rendszer olyasmi, ami egyensúlyban lehet, de ha kibillen az egyensúlyából, akkor hajlamos még jobban kibillenni az egyensúlyából. Gondolj arra, hogy ugyanazt a botot úgy fogod, hogy a kezed alul laposan tartod. Lehetséges egyensúlyban tartani, de ha a bot kibillen az egyensúlyából, akkor hajlamos még jobban kibillenni az egyensúlyából.
Egy botot így is lehet tartani, de csak úgy, hogy folyamatosan változtatod a kezed helyzetét, hogy egyensúlyban tartsd. Figyeled és érzed, hogy merre esik, reagálsz a kezed mozgatásával, hogy ellensúlyozd. Figyelsz és reagálsz, folyamatosan ismételve. Érdekes módon a lebegő mágneses elrendezés nagyjából ugyanígy működik.
Elektromágnesek, érzékelők, visszacsatolás és vezérlés
Kanyarodjunk vissza a mágnes lebegtetéséhez. Hogyan tartja stabilan ez a szerkezet?
A mágnesek taszításán kívül ez a levitátor négy elektromágnessel rendelkezik. Ha a lebegő mágnes valamelyik irányba billen, gyorsan be tud kapcsolni egy elektromágnest, hogy visszataszítsa a középre állított helyzetbe. Ha a rendszer elég gyorsan tud reagálni, az elektromágnesek szükség szerint be- és kikapcsolhatók, hogy a mágnest stabilan tartsák. Az elektromágnesekben az a szép, hogy áramot vezetnek a vezetéken keresztül. Ha tudod, hogyan kell be- és kikapcsolni dolgokat az elektronikával, akkor van eszközöd az elektromágnes gyors és pontos vezérlésére.
Ez a rendszer nem sérti az Earnshaw-tételt, mert nem használ néhány állandó (mindig bekapcsolt) mágnest a lebegő mágnes megtartására. Aktívan vezérelt mágnesek vannak benne, amelyek be- és kikapcsolnak, reagálnak a helytelen igazodásra és korrigálják az instabilitást.
Az ideiglenes mágnesek
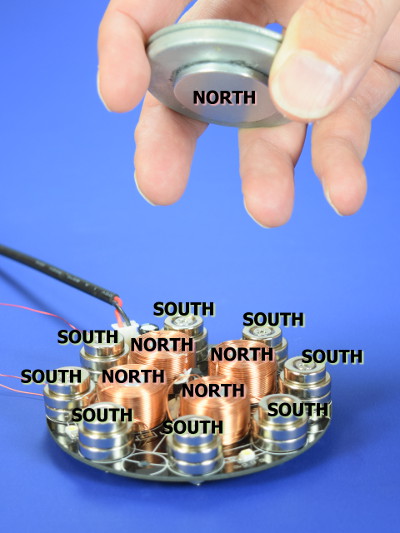
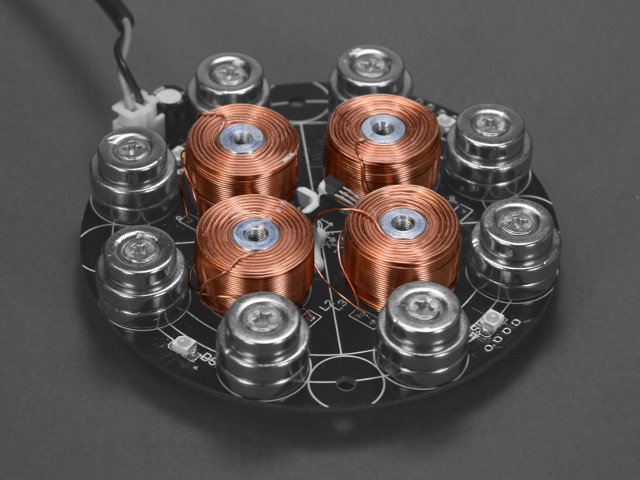
Először is nézzük meg közelebbről a furcsa elrendezést, amit ennek a dolognak az alapjában használnak. Kikapcsolt áramellátás mellett hol vannak a mágnesek és merre néznek? Három különböző helyen kell megnéznünk a mágnesezés irányát:
- Mágnesek egy sorát látjuk, amelyek gyűrűszerűen helyezkednek el a külseje körül. Mindegyik úgy van tájolva, hogy déli pólusuk felfelé néz.
- A lebegő mágnes alján egyetlen korongmágnes van, amely úgy van tájolva, hogy északi pólusa lefelé néz.
- Négy elektromágnest látunk, acéltengelyek köré tekert szigetelt huzalból készült tekercseket. A közeli mágnesgyűrű mezője miatt ezek az acélmagok átmenetileg mágneseződnek, és úgy viselkednek, mint az északi pólusukkal felfelé néző mágnesek.
Várjunk csak, mi történik az utolsó részben? Nem mágnesek, de mégis azok?

Az acél vagy a vas ideiglenes mágnesként viselkedhet. Ha mágneses mezőt alkalmazunk rá (mágnest ragasztunk rá vagy a közelébe), a mező átjárja az acélt, így az acél mágnesként viselkedik (mindaddig, amíg az a mágnes ott van). Ez olyan, mint az iratkapocs-trükk, amikor egy mágnessel felragasztott iratkapocs fel tud venni egy másik iratkapcsot, mert az mágnesként viselkedik. Megnézhetjük az acél gemkapcsot, és mondhatjuk, hogy van egy északi és egy déli pólusa.

Az acélcsavar úgy viselkedik, mint egy mágnes, ha egy neodímium mágnes hozzáér. Egy acélcsavar is úgy viselkedhet mágnesként, ha csak egy neodímium mágnes van a közelében. Ez történik itt ebben a készülékben. Azok az acélmagok úgy viselkednek, mint a mágnesek, az északi pólusaik felfelé néznek, és taszítják a lebegő mágnes északi pólusát.
Az elektromágnesek bekapcsoláskor szükség szerint növelhetik ezeknek a mágneseknek az erejét.
A rendszer önmagában nem stabil. Ha megpróbáljuk kiegyensúlyozni a lebegő mágnest anélkül, hogy bekapcsolnánk a készüléket, az gyorsan elpattan az oldalára.
Miért választottunk egy ilyen bonyolultnak tűnő elrendezést ehhez a konstrukcióhoz? Jó kérdés. Úgy gondoljuk, hogy ennek valami köze lehet ahhoz, hogy egy szélesebb területet alakítsunk ki, ahol a lebegő mágnes szinte stabilan állhat, a mágneses mező “táljába” állítva, amely a középső északi pólusoktól indul, felfelé a külső déli pólusok fölött és lefelé a déli pólusokba.
Szenzorok
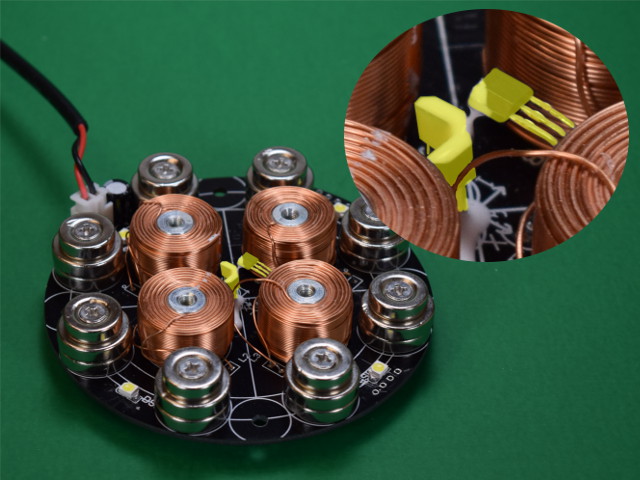
Az elektromágnesek megfelelő vezérléséhez az eszköznek módot kell találnia az úszó mágnes helyzetének pontos érzékelésére. A legapróbb helyzetváltozást is észre kell vennie, hogy gyorsan tudjon reagálni.
Ebben a készülékben három ratiometrikus Hall-effektusú érzékelőt használnak. A Hall-effektusú érzékelőkről szóló korábbi cikkünkben olyan egyszerű eszközöket vizsgáltunk, amelyek lényegében ki-be kapcsolók. Ha egy bizonyos erősség feletti mágneses mezőt “látnak”, akkor bekapcsolnak.
Az itt használt ratiometrikus érzékelők mások. Ahelyett, hogy az érzékelő egy bizonyos térerősségnél ki- vagy bekapcsolna, az apró chipek olyan feszültséget szolgáltatnak, amely a látott mágneses mező erősségével változik. Ha a mágneses mező erősödik, a feszültség emelkedik. Kiválóan alkalmasak a mágneses térerősség apró változásainak érzékelésére.
A készülék közepén három ilyen érzékelő található. Úgy vannak tájolva, hogy minden irányban érzékeljék a mágneses mezőt: fel és le, balra és jobbra, előre és hátra. Egy kis mágneses tudással felvértezve e három érzékelő leolvasásai elegendő információt szolgáltatnak az úszó mágnes magasságáról és helyzetéről.
Amikor az úszó mágnes oldalra billen, a rendszer ezekből a bemenetekből érzékeli azt, és bekapcsolja a jobb oldali elektromágnest, hogy korrekciós lökést adjon neki.
Vezérlés

Ez a készülék három érzékelővel és négy külön vezérelt elektromágnessel rendelkezik. Vessünk egy pillantást a rendszernek csak egy kis részére, hogy képet kapjunk arról, mi is történik. Két érdekes pontra kapcsoltunk egy oszcilloszkópot:
- Az egyik érzékelőből oldalirányba mutató feszültséget (nem a fel-le szenzor), és
- Az egyik tekercs feszültségét (ugyanabban az irányban).
A sárgával ábrázolt érzékelő jel nagyon zajos. A zajt azonban hagyjuk figyelmen kívül, és csak az általános feszültségszintet nézzük. Láttuk, hogy a mágnes helyzetétől függően magasabb vagy alacsonyabb lesz. Körülbelül 1,75 volt körül helyezkedik el, de egy aprócska mértékben változik, ahogy a mágnest megnyomtuk. A változások csak néhány millivoltosak, még akkor is, ha drasztikusan nyomjuk a mágnest.
A kék jel az egyik elektromágnes-tekercs feszültségét mutatja. Körülbelül 2,5 V-ig emelkedik, majd vissza nullára. Vagy be van kapcsolva, vagy ki van kapcsolva. Minden 1/100 000 másodpercenként kapcsol be.
Az erősség beállítása helyett a vezérlőáramkör azt változtatja, hogy mennyi ideig hagyja bekapcsolva a tekercset az 1/100 000 másodperc alatt. Ha nincs szükség sok nyomásra, akkor talán az idő 5%-ában van bekapcsolva. Ha megérintjük a lebegő mágnest, akkor tovább működik. Ezt láthatjuk a felfutási idejű jel szélességében.
Az elektromágnesnek ez a vezérlése 100 kHz-en kapcsol be és ki. Ez 100 kilohertz, vagyis másodpercenként 100 000-szer. Ez nagyon gyors!
Azt reméltük, hogy ezt a jelet egy hangszóróba kapcsolhatjuk, hogy hangként hallhassuk. Jó lenne hallani ezt az interaktív hangvisszajelzést. Sajnos a 100 kHz messze meghaladja az ember által hallható legmagasabb frekvenciát. Ez még a kutyák hallási képességénél is magasabb! Vagy le kellene mintavételeznünk a jelet, vagy meg kellene kérdeznünk néhány delfint, hogy mit gondolnak erről.
Ez egy pillantás csak egy érzékelőre és a négy elektromágnes egyikére. A másik három hasonló módon működik, hogy ellensúlyozza a többi irányba történő dőléseket.
Amellett, hogy a négy elektromágnest külön-külön használjuk, hogy megakadályozzuk, hogy az úszó mágnes bármelyik irányba elbillenjen, az egész rendszernek a teljes jelszintet is szabályoznia kell mind a négy elektromágneshez. Ez befolyásolja a lebegő mágnes magasságát az alap felett.
Következtetések
Nagyon jól szórakoztunk azon, hogy megpróbáltuk kitalálni, hogyan működik ez az eszköz. Minél többet jöttünk rá, annál több olyan egész témát találtunk, amire nem is gondoltunk. Például:
- A rendszer érzékeny a lebegő mágnes súlyára. Ha túl könnyű, nem fog jól működni. Szüksége van bizonyos minimális súlyra ahhoz, ahogyan fel van szerelve.
- A vékony lebegő mágnes fölött van egy acél alátét. Ez nyilvánvalóan ballasztot biztosít, de valódi hatással van a mágneses mező alakjára is. Néhány tesztelés során azt tapasztaltuk, hogy nem tudtuk elérni, hogy a mágnes lebegjen anélkül, hogy ez az acélkorong ne lenne a tetején, ami ellapítja a mezőt. Miért működik ez az elrendezés olyan jól? Miért nem csak egy mágnes színesfém ballaszttal?
Sokszor próbáltuk elmagyarázni, milyen bonyolult lehet a mágneses lebegtetés, fogalmunk sem volt róla, mennyivel többről van szó!
Kiegészítés: Egy sokkal egyszerűbb rendszer

Van egy évekkel ezelőtt beszerzett lebegtető készletünk, amely sokkal egyszerűbb felépítésű. Nézze meg a Guy Marsden által készített ART TEC Magnetic Levitation Kit-et.
Ez a beállítás fejjel lefelé fordítja a rendszert, ami sokkal egyszerűbbé teszi a dolgokat. Egyetlen elektromágnes van elhelyezve a lebegő mágnes felett. Az elektromágnes be- és kikapcsolható, hogy szabályozza a mágnes függőleges helyzetét.
Mivel a mágnes alul “lóg”, általában természetes módon stabil oldalirányban. Mint egy hosszú, lefelé lógó pólus, ebben a konfigurációban természetes stabilitást kapunk. A rendszernek nem kell semmi különöset tennie az oldalirányú mozgás szabályozásához.
Ezt is rákötöttük az oszcilloszkópra, és egy másik szabályozási sémát találtunk. Ahelyett, hogy fix időközönként be- és kikapcsolná az elektromágnest, szükség szerint kapcsol be és ki, reagálva az érzékelő mérésére. Amikor a mágnes kezd túl alacsonyan lenni, bekapcsol, hogy felhúzza. Amikor a mágnes kezd túl magasra kerülni, kikapcsol.
A be- és kikapcsolás gyakorisága attól függően változik, hogy mit mutat az érzékelő. Azt tapasztaltuk, hogy a frekvencia változik, ahogy különböző mágneseket és/vagy különböző súlyokat próbáltunk felakasztani rá.
Amikor olyan elektronikus termékeket lát, amelyek e két alapfelállás egyikét használva lebegtetnek valamit, általában ki lehet találni, hogy melyikről van szó. Ha van valami a lebegő tárgy felett, akkor ez a második, egyszerűbb rendszer. Ha nincs semmi a lebegő fölött, akkor ez az első.