Podobnie jak regulator P-Only, algorytm proporcjonalno-całkujący (PI) oblicza i przekazuje sygnał wyjściowy regulatora (CO) co pewien czas próbkowania, T, do końcowego elementu sterującego (np. zaworu, pompy o zmiennej prędkości). Na obliczony sygnał CO z algorytmu PI wpływają parametry dostrajania regulatora oraz błąd regulatora, e(t).
Regulatory PI mają dwa parametry dostrajania do regulacji. Chociaż czyni je to trudniejszymi do dostrojenia niż regulator P, nie są one tak złożone jak regulator PID z trzema parametrami.
Integralne działanie umożliwia regulatorom PI wyeliminowanie offsetu, głównej słabości regulatora P-only. Tak więc regulatory PI zapewniają równowagę pomiędzy złożonością a możliwościami, co czyni je zdecydowanie najczęściej stosowanym algorytmem w aplikacjach sterowania procesami.
Algorytm PI
Podczas gdy różni producenci przedstawiają zasadniczo ten sam algorytm w różnych formach, tutaj zbadamy to, co jest różnie opisywane jako zależna, idealna, ciągła, pozycyjna forma:

Gdzie:
CO = sygnał wyjściowy sterownika (the wire out)
CObias = bias sterownika lub wartość zerowa; ustawiana przez bezuderzeniowy transfer, jak wyjaśniono poniżej
e(t) = bieżący błąd regulatora, zdefiniowany jako SP – PV
SP = punkt nastawy
PV = mierzona zmienna procesowa (wejście)
Kc = wzmocnienie regulatora, parametr dostrajania
Ti = czas resetowania, parametr dostrajania
Pierwsze dwa terminy na prawo od znaku równości są identyczne z regulatorem P-Only, o którym mowa na początku tego artykułu.
Tryb całkujący regulatora jest ostatnim członem równania. Jego funkcją jest całkowanie lub ciągłe sumowanie błędu regulatora, e(t), w czasie.
Kilka rzeczy, które powinniśmy wiedzieć o parametrze dostrajania czasu resetowania, Ti:
| ▪ | Dostarcza on oddzielną wagę do całki, dzięki czemu wpływ działania całki może być niezależnie regulowany. |
| ▪ | Jest w mianowniku, więc mniejsze wartości zapewniają większą wagę do (tj. |
| ▪ | Ma jednostki czasu, więc zawsze jest dodatnia. |
Funkcja członu proporcjonalnego
Tak jak w przypadku regulatora P-Only, człon proporcjonalny regulatora PI, Kc-e(t), dodaje lub odejmuje od CObias na podstawie wielkości błędu regulatora e(t) w każdym czasie t.
Jak e(t) rośnie lub maleje, ilość dodana do CObias rośnie lub maleje natychmiast i proporcjonalnie. Historia przeszłości i bieżąca trajektoria błędu regulatora nie mają wpływu na obliczanie terminu proporcjonalnego.
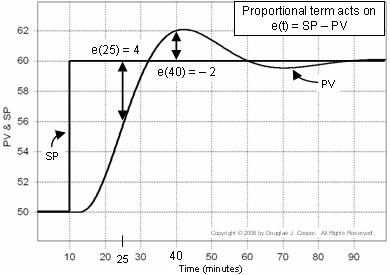
Poniższy wykres (kliknij, aby uzyskać duży widok) ilustruje tę koncepcję dla odpowiedzi punktu nastawy. Błąd użyty w obliczeniach proporcjonalnych jest pokazany na wykresie:
▪ W czasie t = 25 min, e(25) = 60-56 = 4
▪ W czasie t = 40 min, e(40) = 60-62 = -2
Przypominając, że błąd regulatora e(t) = SP – PV, zamiast postrzegać PV i SP jako oddzielne ścieżki, jak to robimy powyżej, możemy obliczyć i wykreślić e(t) w każdym punkcie czasu t.
Poniżej (kliknij, aby powiększyć) znajdują się identyczne dane jak powyżej, tylko są one przekształcone jako wykres e(t). Zauważ, że na wykresie powyżej, PV = SP = 50 dla pierwszych 10 minut, podczas gdy na wykresie błędu poniżej, e(t) = 0 dla tego samego okresu czasu.
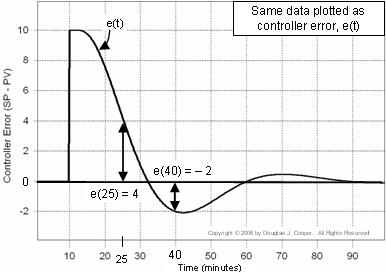
Ten wykres jest użyteczny, ponieważ pomaga nam wizualizować, jak błąd kontrolera stale zmienia rozmiar i znak w miarę upływu czasu.
Funkcja członu całkującego
Podczas gdy człon proporcjonalny rozważa bieżącą wielkość e(t) tylko w czasie obliczania regulatora, człon całkujący rozważa historię błędu, czyli jak długo i jak daleko mierzona zmienna procesowa była od punktu nastawy w czasie.
Integracja jest ciągłym sumowaniem. Integracja błędu w czasie oznacza, że sumujemy całą historię błędów regulatora do chwili obecnej, począwszy od momentu pierwszego przełączenia regulatora na tryb automatyczny.
Błąd regulatora to e(t) = SP – PV. Na poniższym wykresie (kliknij, aby powiększyć), suma całkowa błędu jest obliczona jako zacienione obszary pomiędzy śladami SP i PV.
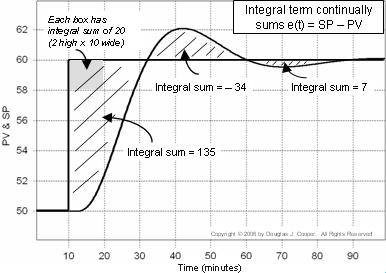
Każde pole na wykresie ma sumę całkową równą 20 (2 wysokie na 10 szerokich). Jeśli policzymy liczbę pól (w tym ułamków pól) zawartych w zacienionych obszarach, możemy obliczyć integralną sumę błędu.
Więc, gdy PV po raz pierwszy przekroczy punkt nastawy około t = 32, suma integralna wzrosła do około 135. Zapisujemy składnik całkowy regulatora PI jako:
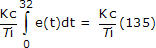
Ponieważ to błąd regulatora napędza obliczenia, otrzymujemy bezpośredni obraz sytuacji z wykresu błędu regulatora, jak pokazano poniżej (kliknij, aby uzyskać duży widok):
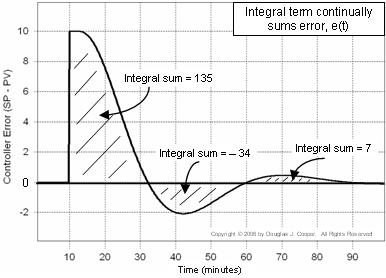
Zauważ, że całka każdej zacienionej części ma ten sam znak co błąd. Ponieważ suma całkowa zaczyna się gromadzić, gdy regulator jest po raz pierwszy wprowadzony w tryb automatyczny, całkowita suma całkowa rośnie tak długo, jak długo e(t) jest dodatnie i kurczy się, gdy jest ujemne.
W czasie t = 60 min na wykresach, suma całkowa wynosi 135 – 34 = 101. Odpowiedź jest w dużej mierze rozstrzygnięta w czasie t = 90 min, a suma całkowa wynosi wtedy 135 – 34 + 7 = 108.
Działanie integralne eliminuje przesunięcie
Poprzednie zdanie zawiera subtelną, ale bardzo ważną obserwację. Odpowiedź jest w dużej mierze kompletna w czasie t = 90 min, jednak integralna suma wszystkich błędów nie jest równa zero.
W tym przykładzie, suma integralna ma końcową lub resztkową wartość 108. To właśnie ta wartość resztkowa umożliwia integralne działanie regulatora PI w celu wyeliminowania offsetu.
Jak omówiono w poprzednim artykule, większość procesów pod kontrolą tylko P doświadcza offsetu podczas normalnej pracy. Offset jest trwałą wartością błędu regulatora (tj. PV nie jest równe SP w stanie ustalonym).
Zgodnie z regulatorem P-Only:

to CO zawsze będzie równe CObias, chyba że coś od niego dodamy lub odejmiemy.
Jedynym sposobem, w jaki mamy coś do dodania lub odjęcia od CObias w powyższym równaniu P-Only jest to, że e(t) nie jest równe zero. Jeśli e(t) nie jest stałe na poziomie zera, wtedy PV nie jest równe SP i mamy offset.
Jednakże, z regulatorem PI:
Wiemy teraz, że całka błędu może mieć wartość końcową lub rezydualną po zakończeniu odpowiedzi. Jest to ważne, ponieważ oznacza to, że e(t) może wynosić zero, ale nadal możemy mieć coś do dodania lub odjęcia od CObias, aby utworzyć ostateczne wyjście kontrolera, CO.
Więc tak długo, jak istnieje jakikolwiek błąd (tak długo, jak e(t) nie wynosi zero), składnik całkowy będzie rósł lub kurczył się w rozmiarze, aby wpływać na CO. Zmiany w CO ustaną dopiero wtedy, gdy PV zrówna się z SP (gdy e(t) = 0) przez dłuższy czas.
W tym momencie całka może mieć wartość rezydualną, o czym właśnie była mowa. Ta wartość resztkowa z całkowania, po dodaniu do CObias, zasadniczo tworzy nową ogólną wartość bias, która odpowiada nowemu poziomowi działania.
W efekcie, działanie całkujące stale resetuje wartość bias w celu wyeliminowania offsetu w miarę zmian poziomu działania.
Wyzwania związane ze sterowaniem PI
Zastosowanie algorytmu PI wiąże się z następującymi wyzwaniami:
| ▪ | Dwa parametry dostrajania oddziałują na siebie, a ich wpływ musi być zrównoważony przez projektanta. |
| ▪ | Termin całkowy ma tendencję do zwiększania oscylacyjnego lub walcowatego zachowania odpowiedzi procesu. |
Ponieważ dwa parametry dostrajania oddziałują ze sobą, uzyskanie „najlepszych” wartości dostrajania może być wyzwaniem. Wartość i znaczenie naszego projektu i przepisu na strojenie wzrasta, gdy sterownik staje się bardziej złożony.
Inicjalizacja sterownika dla bezodrzutowego transferu
Gdy przełączamy jakikolwiek sterownik z trybu ręcznego na automatyczny (z pętli otwartej na zamkniętą), chcemy, aby rezultat był niezauważalny. Oznacza to, że nie chcemy, aby przełączenie spowodowało nagłe działania sterowania, które wpływają na nasz proces lub go zakłócają
Osiągamy ten pożądany wynik przy przełączaniu poprzez inicjalizację całki błędu regulatora na zero. Ponadto, punkt nastawy i wartość biasu regulatora są inicjalizowane przez ustawienie:
▪ SP równa aktualnej wartości PV
▪ CObias równa aktualnej wartości CO
Z sumą całkową błędu ustawioną na zero, nie ma nic do dodania lub odjęcia od CObias, co spowodowałoby nagłą zmianę w aktualnym wyjściu regulatora. Z punktem nastawy równym mierzonej zmiennej procesowej, nie ma błędu, który mógłby spowodować zmianę w naszym CO. A z biasem sterownika ustawionym na naszą aktualną wartość CO, jesteśmy domyślnie przygotowani do utrzymania bieżącej pracy.
Tak więc, kiedy przełączamy się z trybu ręcznego na automatyczny, mamy „bezbolesne przeniesienie” bez żadnych niespodzianek. Jest to wynik, który wszyscy doceniają.
Reset Time Versus Reset Rate
Różni producenci podają swoje algorytmy sterowania w nieco innych formach. Niektórzy używają pasma proporcjonalnego zamiast wzmocnienia regulatora. Ponadto, niektórzy używają szybkości resetowania, Tr, zamiast czasu resetowania. Są one po prostu odwrotnościami siebie nawzajem:
Tr = 1/Ti
Niezależnie od tego, jak wyrażone są parametry strojenia, wszystkie algorytmy PI są tak samo zdolne.
Jednakże bardzo ważne jest, aby poznać swojego producenta przed rozpoczęciem strojenia regulatora, ponieważ wartości parametrów muszą być dopasowane do konkretnej formy algorytmu.Komercyjne oprogramowanie do projektowania i dostrajania regulatorów automatycznie rozwiąże ten problem za Ciebie.
Wdrażanie regulatora PI
Przeanalizujemy projektowanie, dostrajanie i wdrażanie regulatora PI na wymienniku ciepła w tym artykule oraz na grawitacyjnie opróżnianych zbiornikach w tym artykule.
.