Lewitacja elektromagnetyczna

Czy magnes może lewitować lub unosić się nad innym magnesem? Dlaczego nie – wydaje się, że to powinno zadziałać!
Niestety, nie możesz sprawić, by magnes magicznie unosił się w powietrzu nad innym magnesem. Przynajmniej tak jest, jeśli używasz tylko pary silnych magnesów. W naszym artykule Podstawy magnesów wspomnieliśmy o Twierdzeniu Earnshawa, dowodzie pochodzącym z 1800 roku, który udowadnia, że to nie zadziała bez względu na to, ile magnesów dodasz do systemu.
Ale co, jeśli magnesy mają kształt miski? Albo doda się jeszcze jeden magnes z boku? Nie. Earnshaw.
Zbadajmy system, który w jakiś sposób omija starego Earnshawa i udaje mu się utrzymać magnes stabilnie unoszący się w powietrzu. Może nawet utrzymać niewielki ciężar!
Zaczekaj – sprawy się komplikują.
Po pierwsze, zobaczmy go w akcji!
Produkty oparte na tym systemie


Widzieliśmy wiele produktów, które używają tego systemu. Te rzeczy wydają się przyciągać uwagę mediów społecznościowych. Widzieliśmy lewitujące globusy, gdzie ziemia lewituje w powietrzu w jakiś sposób.
Widzieliśmy nawet tę samą technikę używaną do lewitowania małego drzewka bonsai! Tak fajnie.
Jak to działa? Rozłóżmy to krok po kroku.
Zacznij prosto

Podstawową ideą jest sprawienie, aby magnes unosił się w powietrzu poprzez podtrzymywanie go siłą odpychającą innego magnesu. Magnesy mogą się odpychać od siebie z wystarczającą siłą. Posiadanie wystarczającej siły do lewitacji nie jest problemem.
Problemem jest to, że ten układ nie jest stabilny. Pływający magnes ma tendencję do obracania się, odwracając się, aby przyciągnąć drugi magnes.
To jest prawdziwe nawet jeśli wyłożysz miskę garścią magnesów, ponieważ Earnshaw.
Stabilność, styl inżynierski


Poświęćmy chwilę na zdefiniowanie, co rozumiemy przez stabilność. Stabilny system to coś, co jest zrównoważone, ale również ma tendencję do powrotu do wyśrodkowanej, zrównoważonej pozycji, jeśli go trochę podważyć.
Jako przykład, rozważmy długi kij lub tyczkę, trzymaną od góry. To jest stabilne wiszące prosto w dół. Jeśli odepchniemy dolną część od pozycji prosto w dół, grawitacja będzie miała tendencję do ściągnięcia go z powrotem do stabilnej pozycji.
Jasne, może nie zatrzasnąć się na miejscu przy pierwszym zamachu. Będzie się kołysać w przód i w tył przez jakiś czas, z kolejnymi krótszymi kołysaniami, gdy się ustabilizuje. Ma tendencję do powrotu ostatecznie.
Niestabilny system jest coś, co może być zrównoważony, ale jeśli dostaje off-balance, ma tendencję do coraz bardziej unbalanced. Rozważmy trzymanie tego samego kija z ręką trzymaną płasko na dole. Ja jest ewentualny balansować je, ale gdy kij przechyla się poza równowagą, ono miewa skłonność spadać więcej poza równowagą.
Ty możesz trzymać kij w ten sposób, ale tylko przez nieustanne dostosowywanie twój ręki pozycja utrzymywać je balansować. Obserwujesz i czujesz, w którą stronę spada, reagujesz przesuwając rękę, aby temu przeciwdziałać. Obserwujesz i reagujesz, powtarzając to nieustannie. Co ciekawe, układ lewitującego magnesu działa w bardzo podobny sposób.
Elektromagnesy, czujniki, sprzężenie zwrotne i sterowanie
Powróćmy do lewitowania magnesu. Jak to urządzenie utrzymuje go stabilnie?
W dodatku do odpychania magnesów, ten lewitator posiada cztery elektromagnesy. Jeśli magnes pływający przechyli się w jedną stronę, może szybko włączyć elektromagnes, aby odepchnąć go z powrotem do pozycji środkowej. Jeśli system może reagować wystarczająco szybko, elektromagnesy mogą być włączane i wyłączane w razie potrzeby, aby utrzymać magnes w stabilnej pozycji. Miłą rzeczą w elektromagnesach jest to, że są one uruchamiane z prądem przez przewód. Jeśli wiesz, jak włączać i wyłączać rzeczy za pomocą elektroniki, masz sposób na kontrolowanie elektromagnesu szybko i dokładnie.
Ten system nie narusza twierdzenia Earnshawa, ponieważ nie używa pewnej liczby stałych (zawsze włączonych) magnesów, aby utrzymać magnes pływający. Posiada on aktywnie kontrolowane magnesy, które są włączane i wyłączane, reagując na złe ustawienie i korygując niestabilność.
Magnesy tymczasowe
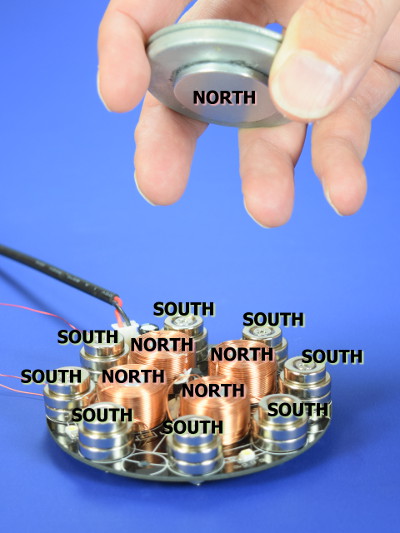
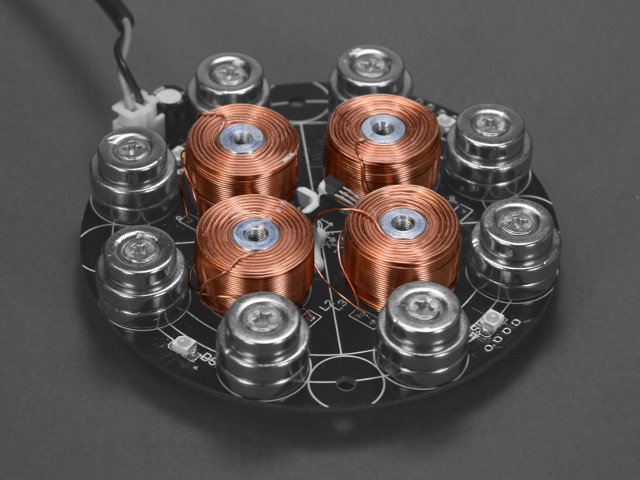
Najpierw przyjrzyjmy się bliżej dziwnej konfiguracji użytej w podstawie tego urządzenia. Przy wyłączonym zasilaniu, gdzie są magnesy i w którą stronę są skierowane? Istnieją trzy różne miejsca, w których powinniśmy spojrzeć na kierunek namagnesowania:
- Widzimy serię magnesów ułożonych w pierścień wokół zewnętrznej części. Wszystkie są zorientowane biegunami południowymi do góry.
- Na spodzie magnesu pływającego znajduje się pojedynczy magnes tarczowy, zorientowany biegunem północnym do dołu.
- Na zewnątrz znajdują się cztery elektromagnesy, zwoje izolowanego drutu owinięte wokół stalowych wałków. Ze względu na pole pobliskiego pierścienia magnesów, te stalowe rdzenie są tymczasowo namagnesowane, działając jak magnesy z biegunami północnymi skierowanymi do góry.
Czekaj, co się dzieje w tej ostatniej części? Nie są magnesami, ale nimi są?

Stal lub żelazo mogą działać jak tymczasowy magnes. Kiedy pole magnetyczne jest przyłożone do niego (przyłóż magnes do niego lub w jego pobliżu), pole przepływa przez stal, sprawiając, że stal zachowuje się jak magnes (tak długo, jak magnes jest tam). Przypomina to sztuczkę ze sznurkiem spinaczy, gdzie spinacz z przyklejonym magnesem może podnieść inny spinacz, ponieważ zachowuje się jak magnes. Możemy spojrzeć na stalowy spinacz i powiedzieć, że ma on biegun północny i południowy.

Śruba stalowa zachowuje się jak magnes, gdy dotyka jej magnes neodymowy. Stalowa śruba może również zachowywać się jak magnes po prostu mając magnes neodymowy w pobliżu. To właśnie dzieje się w tym urządzeniu. Te stalowe rdzenie zachowują się jak magnesy z biegunami północnymi skierowanymi do góry, odpychając biegun północny magnesu pływającego.
Po włączeniu zasilania elektromagnesy mogą w razie potrzeby zwiększyć siłę tych magnesów.
System sam w sobie nie jest stabilny. Jeśli spróbujesz zrównoważyć magnes pływający bez włączania zasilania, szybko odskoczy na bok.
Dlaczego tak pozornie skomplikowany układ został wybrany do tego projektu? Dobre pytanie. Myślimy, że może to mieć coś wspólnego z tworzeniem szerszego obszaru, w którym magnes pływający może być prawie stabilny, ustawiony w „misce” pola magnetycznego idącego od biegunów północnych w środku, w górę nad i w dół do biegunów południowych na zewnątrz.
Czujniki
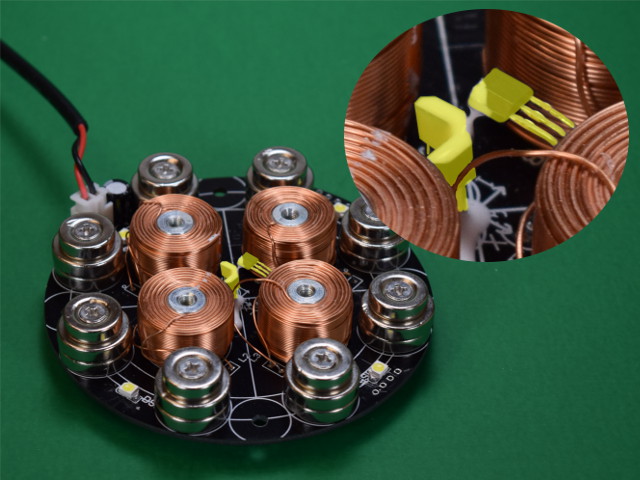
Aby prawidłowo sterować elektromagnesami, urządzenie potrzebuje sposobu dokładnego wyczuwania położenia magnesu pływającego. Musi ono zauważyć najdrobniejszą zmianę położenia, aby móc szybko zareagować.
W urządzeniu tym zastosowano trzy ratiometryczne czujniki efektu Halla. W poprzednim artykule na temat czujników efektu Halla, przyjrzeliśmy się prostym urządzeniom, które są w zasadzie przełącznikami on/off. Jeśli „widzą” one pole magnetyczne, które jest powyżej pewnego natężenia, włączają się.
Użyte tutaj czujniki ratiometryczne są inne. Zamiast czujnika, który włącza się lub wyłącza przy określonym natężeniu pola, maleńkie chipy dostarczają napięcie, które zmienia się wraz z natężeniem pola magnetycznego, które widzą. Jeśli pole magnetyczne staje się silniejsze, napięcie wzrasta. Są świetne do wykrywania drobnych zmian w natężeniu pola magnetycznego.
Trzy z tych czujników znajdują się w centrum urządzenia. Są one zorientowane tak, aby wyczuwać pole magnetyczne w każdym kierunku: w górę i w dół, w lewo i w prawo, w przód i w tył. Uzbrojone w odrobinę wiedzy magnetycznej, odczyty z tych trzech czujników dostarczają wystarczających informacji o wysokości i pozycji magnesu pływającego.
Gdy magnes pływający odchyla się na bok, system może to wyczuć na podstawie tych danych wejściowych i włączyć prawy elektromagnes, aby nadać mu korygujące pchnięcie.
Kontrola

To urządzenie ma trzy czujniki i cztery oddzielnie sterowane elektromagnesy. Przyjrzyjmy się tylko niewielkiej części układu, aby zorientować się, co się dzieje. Podłączyliśmy oscyloskop do dwóch interesujących punktów:
- Napięcie z jednego z czujników skierowanych w bok (nie jest to czujnik góra-dół), oraz
- Napięcie na jednej z cewek (w tym samym kierunku).
Sygnał z czujnika, pokazany na żółto, jest bardzo zaszumiony. Zignoruj szumy i spójrz na ogólny poziom napięcia. Widzieliśmy, że jest ono wyższe lub niższe w zależności od położenia magnesu. Wynosi ono około 1,75 V, ale zmienia się w niewielkim stopniu, gdy naciskamy na magnes. Zmiany wynoszą zaledwie kilka miliwoltów, nawet gdy drastycznie przesuwamy magnes.
Niebieski sygnał pokazuje napięcie na jednej z cewek elektromagnesu. Wzrasta ono do około 2,5 V i wraca do zera. Jest albo włączony, albo wyłączony. Włącza się co 1/100,000 sekundy.
Raczej niż regulować siłę, obwód sterowania zmienia jak długo pozostawia tę cewkę włączoną podczas tej 1/100,000 sekundy. Jeśli nie potrzebuje dużego nacisku, jest włączona może przez 5% czasu. Kiedy dotykamy magnesu pływającego, cewka jest włączona dłużej. Widać to po szerokości sygnału up-time.
Ta kontrola elektromagnesu włącza się i wyłącza przy 100 kHz. To jest 100 kiloherców, czyli 100 000 razy na sekundę. To naprawdę szybko!
Mieliśmy nadzieję, że uda nam się podłączyć ten sygnał do głośnika, abyśmy mogli usłyszeć go jako dźwięk. Byłoby fajnie usłyszeć to interaktywne sprzężenie zwrotne audio. Niestety, 100 kHz jest znacznie powyżej najwyższej częstotliwości, jaką ludzie mogą usłyszeć. Jest to nawet powyżej zdolności słyszenia przez psa! Musielibyśmy albo zmniejszyć próbkowanie sygnału, albo zapytać delfiny, co o tym sądzą.
To jest spojrzenie na jeden czujnik i jeden z czterech elektromagnesów. Pozostałe trzy działają w podobny sposób, aby przeciwdziałać przechyłom w innych kierunkach.
Oprócz używania czterech elektromagnesów indywidualnie, aby zapobiec przechylaniu się magnesu pływającego w dowolnym kierunku, cały system musi również kontrolować ogólny poziom sygnału do wszystkich czterech elektromagnesów. To będzie miało wpływ na wysokość magnesu pływającego nad podstawą.
Wnioski
Mieliśmy dużo zabawy próbując dowiedzieć się jak działa to urządzenie. Im więcej się dowiadywaliśmy, tym więcej znajdowaliśmy tematów, których nawet nie braliśmy pod uwagę. Na przykład:
- System jest wrażliwy na ciężar pływającego magnesu. Jeśli jest on zbyt lekki, nie będzie działał dobrze. Potrzebuje pewnej minimalnej wagi dla sposobu w jaki jest ustawiony.
- Nad cienkim magnesem pływającym znajduje się stalowa podkładka. To oczywiście zapewnia balast, ale ma również realny wpływ na kształt pola magnetycznego. Podczas testów okazało się, że nie mogliśmy sprawić, aby magnes unosił się na wodzie bez tej stalowej podkładki na górze, która spłaszczała pole. Dlaczego ten układ działa tak dobrze? Dlaczego nie wystarczy magnes z nieżelaznym balastem?
Często staraliśmy się wyjaśnić, jak skomplikowana może być lewitacja magnetyczna, nie mieliśmy pojęcia, jak wiele jeszcze jest z tym związanych!
Dodatek: Znacznie prostszy system

Mamy zestaw do lewitacji, który nabyliśmy lata temu, który ma znacznie prostszą konfigurację. Sprawdź ART TEC Magnetic Levitation Kit by Guy Marsden.
Ta konfiguracja odwraca system do góry nogami, czyniąc rzeczy o wiele łatwiejszymi. Posiada on pojedynczy elektromagnes umieszczony nad magnesem pływającym. Elektromagnes włącza się i wyłącza, aby kontrolować pionową pozycję magnesu.
Ponieważ magnes „wisi” na dole, ma tendencję do naturalnej stabilności z boku na bok. Podobnie jak w przypadku długiego słupa wiszącego w dół, w tej konfiguracji uzyskuje się naturalną stabilność. System nie musi robić nic wymyślnego, aby kontrolować ruchy boczne.
Podłączyliśmy go również do oscyloskopu i znaleźliśmy inny schemat sterowania. Zamiast włączać i wyłączać elektromagnes w stałych odstępach czasu, włącza się on i wyłącza w razie potrzeby, reagując na pomiary czujnika. Gdy magnes zaczyna schodzić zbyt nisko, włącza się, aby go podnieść. Kiedy magnes zaczyna być za wysoko, wyłącza się.
Częstotliwość tego włączania i wyłączania zmienia się w zależności od tego, co mówi czujnik. Stwierdziliśmy, że częstotliwość zmieniała się, gdy próbowaliśmy zawieszać na nim różne magnesy i/lub różne ciężary.
Gdy widzisz produkty elektroniczne, które lewitują coś przy użyciu jednej z tych dwóch podstawowych konfiguracji, zazwyczaj możesz dowiedzieć się, która z nich to jest. Jeśli coś znajduje się nad unoszącym się obiektem, to jest to ten drugi, prostszy system. Jeśli nie ma nic nad unoszącym się obiektem, to jest to pierwszy system.
.