Elektromagnetisk svävning

Kan en magnet sväva eller sväva över en annan magnet? Varför inte – det verkar som om det borde fungera!
Det går tyvärr inte att få en magnet att sväva magiskt i luften ovanför en annan magnet. Åtminstone gäller det om du bara använder ett par starka magneter. I vår artikel om magnetens grunder nämnde vi Earnshaws teorem, ett bevis från 1800-talet som visar att det inte fungerar oavsett hur många magneter du lägger till i systemet.
Men vad händer om magneterna är formade som en skål? Eller om ytterligare en magnet läggs till på sidan? Nej. Earnshaw.
Låt oss undersöka ett system som på något sätt kringgår gamla Earnshaw och lyckas hålla en magnet stadigt svävande i luften. Den kan till och med hålla en liten mängd vikt!
Häng kvar – det blir mer komplicerat härifrån.
Först ska vi se det i aktion!
Produkter baserade på det här systemet


Vi har sett ett antal produkter som använder det här systemet. Dessa saker verkar fånga upp ögonen i sociala medier. Vi har sett svävande glober, där jorden svävar i luften på något sätt.
Vi har till och med sett samma teknik användas för att få ett litet bonsaiträd att sväva! Så häftigt.
Hur fungerar det? Låt oss ta reda på det steg för steg.
Start enkelt

Grundidén är att få en magnet att sväva genom att hålla den uppe med den frånstötande kraften från en annan magnet. Magneter kan stöta bort varandra med tillräcklig kraft. Att ha tillräcklig kraft för att få den att sväva är inte problemet.
Problemet är att denna uppställning inte är stabil. Den svävande magneten tenderar att rotera runt och vända sig själv för att attrahera den andra magneten.
Detta gäller även om man klär en skål med en massa magneter, eftersom Earnshaw.
Stabilitet, ingenjörsstil


Låt oss ta en stund för att definiera vad vi menar med stabilitet. Ett stabilt system är något som är balanserat, men som också tenderar att gå tillbaka till det centrerade, balanserade läget om du stöter på det lite.
Som exempel kan du tänka dig en lång pinne eller stolpe som hålls uppifrån. Den är stabil när den hänger rakt ner. Om vi trycker bort undersidan från ett rakt nedåtriktat läge tenderar gravitationen att dra tillbaka den till det stabila läget.
Visst, den kanske inte snäpper fast på plats vid första svinget. Den kommer att svänga fram och tillbaka en stund, med successivt kortare svängningar när den sätter sig. Det tenderar att gå tillbaka så småningom.
Ett instabilt system är något som kan vara i balans, men om det hamnar ur balans tenderar det att bli mer obalanserat. Tänk på att hålla samma käpp med handen platt nedtill. Det är möjligt att balansera den, men när pinnen lutar ur balans tenderar den att falla mer ur balans.
Du kan hålla en pinne så här, men bara genom att ständigt justera din handposition för att hålla den i balans. Du ser och känner åt vilket håll den faller, reagerar genom att flytta handen för att motverka det. Du tittar och reagerar, vilket upprepas kontinuerligt. Intressant nog fungerar den svävande magnetuppställningen på ungefär samma sätt.
Elektromagneter, sensorer, återkoppling och styrning
Låt oss återgå till att sväva med en magnet. Hur håller den här apparaten den stadigt?
Den här levitatorn har fyra elektromagneter, förutom att den stöter bort magneter. Om den flytande magneten tippar åt ena hållet kan den snabbt aktivera en elektromagnet för att stöta bort den tillbaka till det centrerade läget. Om systemet kan reagera tillräckligt snabbt kan elektromagneterna slås på och av vid behov för att hålla magneten stadig. Det fina med elektromagneter är att de drivs med en ström genom ledningen. Om man vet hur man sätter på och stänger av saker med elektronik har man ett sätt att styra elektromagneten snabbt och exakt.
Detta system bryter inte mot Earnshaws sats eftersom det inte använder ett antal permanenta (alltid påslagna) magneter för att hålla fast den flytande magneten. Det har aktivt styrda magneter som slås på och av, reagerar på felinriktning och korrigerar instabiliteten.
Temporära magneter
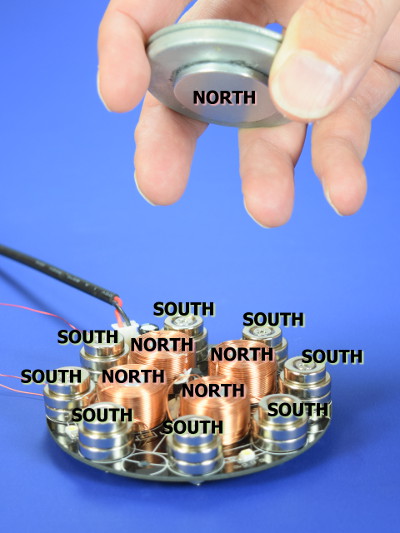
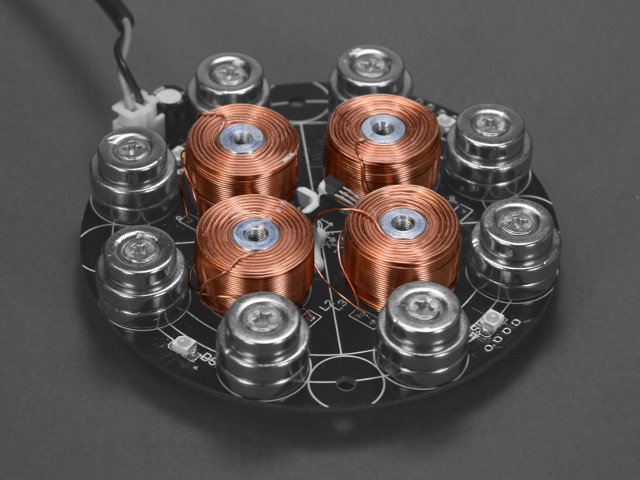
Först ska vi ta en närmare titt på den märkliga uppställning som används i basen på den här saken. När strömmen är avstängd, var är magneterna och åt vilket håll är de vända? Det finns tre olika ställen där vi ska titta på magnetiseringsriktningen:
- Vi ser en serie magneter arrangerade i en ring runt utsidan. De är alla orienterade med sina sydpoler uppåt.
- Det finns en enda skivmagnet på botten av den flytande magneten, orienterad med sin nordpol nedåt.
- Det finns fyra elektromagneter, spolar av isolerad tråd som är lindade runt stålskaft. På grund av fältet från den närliggande magnetringen är dessa stålkärnor tillfälligt magnetiserade och fungerar som magneter med nordpolen uppåt.
Vänta, vad är det som händer i den sista delen? De är inte magneter men de är det?

Stahl eller järn kan agera som en tillfällig magnet. När ett magnetfält appliceras på det (sätt en magnet på det eller i närheten av det) kanaliserar fältet genom stålet, vilket gör att stålet fungerar som en magnet (så länge som magneten finns där). Detta är som tricket med pappersklämmor, där en pappersklämma med en magnet fastklistrad på sig kan plocka upp en annan pappersklämma, eftersom den beter sig som en magnet. Vi kan titta på stålklämman och säga att den har en nord- och en sydpol.

En stålskruv fungerar som en magnet när en neodym-magnet rör vid den. En stålbult kan också agera som en magnet bara genom att ha en neodymmagnet i närheten av den. Det är vad som händer här i den här anordningen. Dessa stålkärnor fungerar som magneter med sina nordpoler uppåt och stöter bort den flytande magnetens nordpol.
När de är påslagna kan elektromagneterna öka styrkan hos dessa magneter vid behov.
Systemet är inte stabilt av sig självt. Om man försöker balansera den flytande magneten utan att sätta igång apparaten, går den snabbt åt sidan.
Varför valdes en sådan till synes komplex uppställning för den här konstruktionen? Det är en bra fråga. Vi tror att det kan ha något att göra med att skapa ett större område där den flytande magneten kan vara nästan stabil, placerad i ”skålen” av magnetfältet som går från nordpolerna i mitten, upp över och ner i sydpolerna på utsidan.
Sensorer
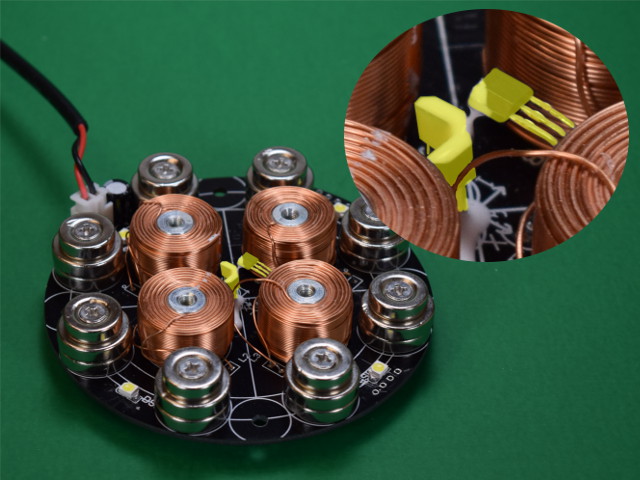
För att kunna styra elektromagneterna på ett korrekt sätt behöver anordningen ett sätt att exakt känna av positionen för den flytande magneten. Den måste märka den minsta förändring i positionen så att den kan reagera snabbt.
I denna anordning används tre ratiometriska Hall-effektsensorer. I en tidigare artikel om Hall-effektsensorer tittade vi på enkla anordningar som i huvudsak är on/off-brytare. Om de ”ser” ett magnetfält som är över en viss styrka slår de på.
De ratiometriska sensorer som används här är annorlunda. I stället för en sensor som slår på eller av vid en viss fältstyrka levererar de små chipen en spänning som varierar med styrkan hos det magnetfält som de ser. Om magnetfältet blir starkare stiger spänningen. De är utmärkta för att känna av små förändringar i magnetfältets styrka.
Det finns tre av dessa sensorer placerade i mitten av enheten. De är orienterade så att de känner av magnetfältet i varje riktning: uppåt och nedåt, vänster och höger, framåt och bakåt. Beväpnad med lite magnetisk kunskap ger avläsningarna från dessa tre sensorer tillräckligt med information om den flytande magnetens höjd och position.
När den flytande magneten tippar åt sidan kan systemet känna av det från dessa ingångar och slå på den högra elektromagneten för att ge den en korrigerande knuff.
Kontroll

Den här anordningen har tre sensorer och fyra separat styrda elektromagneter. Låt oss ta en titt på bara en liten del av systemet för att få en uppfattning om vad som händer. Vi kopplade ett oscilloskop till två intressanta punkter:
- Spänningen ut från en av sensorerna som pekar i sidled (inte upp-och-ned-sensorn), och
- Spänningen på en av spolarna (i samma riktning).
Sensorns signal, som visas i gult, är mycket brusig. Ignorera dock bruset och titta bara på den totala spänningsnivån. Vi såg att den blir högre eller lägre beroende på magnetens position. Den ligger runt 1,75 volt, men ändras en liten bit när vi trycker på magneten. Förändringarna är bara några millivolt, även när vi trycker drastiskt på magneten.
Den blå signalen visar spänningen till en av elektromagnetspolarna. Den går upp till ungefär 2,5 V och tillbaka till noll. Den är antingen på eller av. Den slår på var 1/100 000:e sekund.
Istället för att justera styrkan varierar styrkretsen hur länge den låter spolen vara på under denna 1/100 000:e sekund. Om den inte behöver mycket tryck är den på kanske 5 % av tiden. När vi rör vid den flytande magneten är den på längre tid. Du kan se detta i bredden på upptidssignalen.
Denna styrning av elektromagneten slår på och av vid 100 kHz. Det är 100 kiloHertz, eller 100 000 gånger per sekund. Det är verkligen snabbt!
Vi hade hoppats kunna koppla in den här signalen i en högtalare så att vi kunde höra den som ljud. Det skulle vara häftigt att höra den interaktiva ljudåterkopplingen. Tyvärr är 100 kHz långt över den högsta frekvens som människor kan höra. Det är till och med över en hunds förmåga att höra den! Vi skulle antingen behöva nedgradera signalen eller fråga några delfiner vad de tycker om den.
Detta är en titt på bara en sensor och en av de fyra elektromagneterna. De andra tre arbetar på liknande sätt för att motverka lutningar i de andra riktningarna.
Förutom att använda de fyra elektromagneterna individuellt för att förhindra att den flytande magneten tippar iväg i alla riktningar måste hela systemet också styra den övergripande signalnivån till alla fyra elektromagneterna. Det kommer att påverka den flytande magnetens höjd över basen.
Slutsatser
Vi har haft mycket roligt med att försöka lista ut hur den här anordningen fungerar. Ju mer vi räknade ut, desto mer hittade vi hela ämnen som vi inte ens hade tänkt på. Till exempel:
- Systemet är känsligt för den flytande magnetens vikt. Om den är för lätt fungerar det inte bra. Det behöver en viss minimivikt för det sätt som det är uppbyggt.
- Det finns en stålbricka ovanför den tunna flytande magneten. Denna ger naturligtvis ballast, men den har också en verklig effekt på magnetfältets form. Vid vissa tester fann vi att vi inte kunde få en magnet att flyta utan denna stålskiva ovanpå, som plattar ut fältet. Varför fungerar det här arrangemanget så bra? Varför inte bara en magnet med järnfri ballast?
Vi har ofta försökt förklara hur komplicerad magnetisk levitation kan vara, vi hade ingen aning om hur mycket mer det innebar!
Addendum: Ett mycket enklare system

Vi har ett levitationskit som vi skaffade för flera år sedan och som har en mycket enklare uppställning. Kolla in ART TEC Magnetic Levitation Kit av Guy Marsden.
Denna uppställning vänder upp och ner på systemet, vilket gör saker och ting mycket enklare. Den har en enda elektromagnet placerad ovanför den flytande magneten. Elektromagneten vänds på och av för att styra magnetens vertikala läge.
Då magneten ”hänger” nedanför tenderar den att vara naturligt stabil från sida till sida. Som en lång pol som hänger ner får man naturlig stabilitet i denna konfiguration. Systemet behöver inte göra något märkvärdigt för att styra sidoförflyttning.
Vi kopplade även denna till oscilloskopet och fann ett annat styrsystem. Istället för att slå på och av elektromagneten med fasta intervaller slår den på och av vid behov och reagerar på sensorns mätning. När magneten börjar bli för låg, slår den på för att dra upp den. När magneten börjar bli för hög stängs den av.
Frekvensen för denna på- och avkoppling varierar beroende på vad sensorn säger. Vi fann att frekvensen förändrades när vi försökte hänga olika magneter och/eller olika vikter i den.
När du ser elektroniska produkter som svävar upp något med hjälp av en av dessa två grunduppställningar kan du vanligtvis räkna ut vilken det är. Om det finns något ovanför det svävande föremålet är det det andra, enklare systemet. Om det inte finns något ovanför det flytande föremålet är det det första.